卷积在pytorch中有两种实现,一种是torch.nn.Conv2d(),一种是torch.nn.functional.conv2d(),这两种方式本质都是执行卷积操作,对输入的要求也是一样的,首先需要输入的是一个torch.autograd.Variable()的类型,大小是(batch,channel, H,W),其中batch表示输入的一批数据的数目,channel表示输入的通道数。
一般一张彩色的图片是3,灰度图片是1,而卷积网络过程中的通道数比较大,会出现几十到几百的通道数。H和W表示输入图片的高度和宽度,比如一个batch是32张图片,每张图片是3通道,高和宽分别是50和100,那么输入的大小就是(32,3,50,100)。
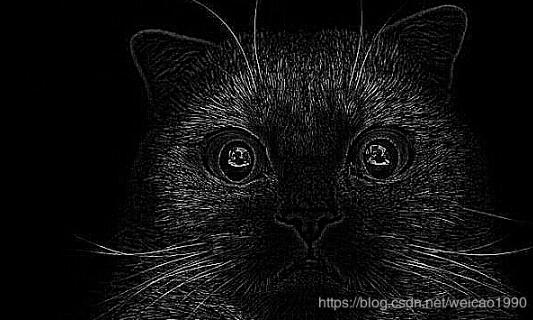
如下代码是卷积执行soble边缘检测算子的实现:
import torch
import numpy as np
from torch import nn
from PIL import Image
from torch.autograd import Variable
import torch.nn.functional as F
def nn_conv2d(im):
# 用nn.Conv2d定义卷积操作
conv_op = nn.Conv2d(1, 1, 3, bias=False)
# 定义sobel算子参数
sobel_kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32')
# 将sobel算子转换为适配卷积操作的卷积核
sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3))
# 给卷积操作的卷积核赋值
conv_op.weight.data = torch.from_numpy(sobel_kernel)
# 对图像进行卷积操作
edge_detect = conv_op(Variable(im))
# 将输出转换为图片格式
edge_detect = edge_detect.squeeze().detach().numpy()
return edge_detect
def functional_conv2d(im):
sobel_kernel = np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32') #
sobel_kernel = sobel_kernel.reshape((1, 1, 3, 3))
weight = Variable(torch.from_numpy(sobel_kernel))
edge_detect = F.conv2d(Variable(im), weight)
edge_detect = edge_detect.squeeze().detach().numpy()
return edge_detect
def main():
# 读入一张图片,并转换为灰度图
im = Image.open('./cat.jpg').convert('L')
# 将图片数据转换为矩阵
im = np.array(im, dtype='float32')
# 将图片矩阵转换为pytorch tensor,并适配卷积输入的要求
im = torch.from_numpy(im.reshape((1, 1, im.shape[0], im.shape[1])))
# 边缘检测操作
# edge_detect = nn_conv2d(im)
edge_detect = functional_conv2d(im)
# 将array数据转换为image
im = Image.fromarray(edge_detect)
# image数据转换为灰度模式
im = im.convert('L')
# 保存图片
im.save('edge.jpg', quality=95)
if __name__ == "__main__":
main()
原图片:cat.jpg

结果图片:edge.jpg
以上这篇Pytorch 实现sobel算子的卷积操作详解就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持亿速云。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务


