дҪҝз”ЁOpenCVжҖҺд№ҲиҜҶеҲ«еңҶдёҺзҹ©еҪў
жң¬зҜҮж–Үз« з»ҷеӨ§е®¶еҲҶдә«зҡ„жҳҜжңүе…ідҪҝз”ЁOpenCVжҖҺд№ҲиҜҶеҲ«еңҶдёҺзҹ©еҪўпјҢе°Ҹзј–и§үеҫ—жҢәе®һз”Ёзҡ„пјҢеӣ жӯӨеҲҶдә«з»ҷеӨ§е®¶еӯҰд№ пјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« еҗҺеҸҜд»ҘжңүжүҖ收иҺ·пјҢиҜқдёҚеӨҡиҜҙпјҢи·ҹзқҖе°Ҹзј–дёҖиө·жқҘзңӢзңӢеҗ§гҖӮ
иҜҶеҲ«еңҶ
еңЁиҜҶеҲ«еңҶж–№йқўпјҢOpenCVжңүеҶ…зҪ®зҡ„ж–№жі•пјҡйңҚеӨ«еңҶеҸҳеҢ–пјҡ
HoughCircles(edges, circles, CV_HOUGH_GRADIENT, 1.5, 10, 200, 100, 0, 0);
еҸӮж•°еҲҶжһҗпјҡ
edges:зҒ°еәҰеӣҫеғҸ
circles: std::vector<Vec3f> circles;ж•°з»„пјҢз”ЁжқҘеӯҳеӮЁеңҶзҡ„еқҗж ҮдҝЎжҒҜ
CV_HOUGH_GRADIENTпјҡHough еҸҳжҚўж–№ејҸпјҢзӣ®еүҚеҸӘж”ҜжҢҒCV_HOUGH_GRADIENT, which is basically 21HT, described in [Yuen03].й»ҳи®Өз”ЁиҝҷдёӘ
1.5пјҡзҙҜеҠ еҷЁеӣҫеғҸзҡ„еҲҶиҫЁзҺҮпјҢ1зҡ„ж—¶еҖҷжҳҜдёҺиҺ·еҸ–еҲ°зҡ„еӣҫеғҸзӣёеҗҢпјҢ1.5е°ұжҳҜ1.5еҖҚ
10пјҡеңҶдёҺеңҶзҡ„жңҖе°Ҹи·қзҰ»пјҢдёӨдёӘеңҶеҝғи·қзҰ»еҰӮжһңеңЁиҢғеӣҙеҶ…еҲҷиў«и®Өе®ҡдёә1дёӘеңҶ
200пјҡ100-200дёӨдёӘеҸӮж•°йҖүе°ұеӨҹдәҶ
100пјҡй»ҳи®Ө100пјҢж•°еҖји¶ҠдҪҺиҜҶеҲ«еңҶи¶ҠдёҚзІҫзЎ®пјҲеңҶзҡ„ж•°йҮҸиҜҶеҲ«еҸҳеӨҡеҸҜиғҪжңүдёӘеј§зәҝе°ұиў«иҜҶеҲ«жҳҜеңҶпјү
жңҖеҗҺдёӨдёӘеҸӮж•°еҲҶеҲ«жҳҜиҜҶеҲ« еңҶзҡ„жңҖе°ҸпјҢжңҖеӨ§зҡ„йқўз§ҜгҖӮ
зҹ©еҪўиҜҶеҲ«
зҹ©еҪўиҜҶеҲ«е№¶жІЎжңүеҶ…зҪ®ж–№жі•пјҢйңҖиҰҒиҮӘе·ұжүӢеҶҷгҖӮ
жңҖдё»иҰҒзҡ„ж–№жі•жҳҜдәҢеҖјеҢ–гҖӮйҖҡиҝҮдәҢеҖјеҢ–жқҘи°ғиҠӮиҜҶеҲ«зҡ„ејәеәҰгҖӮ
cvThreshold(tgray, gray, 75, 250, CV_THRESH_BINARY);
еҸӮж•°еҲҶжһҗпјҡ
srcпјҡеҺҹе§Ӣж•°з»„ (еҚ•йҖҡйҒ“ , 8-bit of 32-bit жө®зӮ№ж•°)гҖӮ
dstпјҡиҫ“еҮәж•°з»„пјҢеҝ…йЎ»дёҺ src зҡ„зұ»еһӢдёҖиҮҙпјҢжҲ–иҖ…дёә 8-bitгҖӮ
thresholdпјҡйҳҲеҖј
max_valueпјҡдҪҝз”Ё CV_THRESH_BINARY е’Ң CV_THRESH_BINARY_INV зҡ„жңҖеӨ§еҖјгҖӮ
threshold_typeпјҡйҳҲеҖјзұ»еһӢ
threshold_type=CV_THRESH_BINARY:еҰӮжһң src(x,y)>threshold ,dst(x,y) = max_value; еҗҰеҲҷ,dstпјҲx,yпјү=0;
threshold_type=CV_THRESH_BINARY_INV:еҰӮжһң src(x,y)>threshold,dst(x,y) = 0; еҗҰеҲҷ,dst(x,y) = max_value.
threshold_type=CV_THRESH_TRUNC:еҰӮжһң src(x,y)>thresholdпјҢdst(x,y) = max_value; еҗҰеҲҷdst(x,y) = src(x,y).
threshold_type=CV_THRESH_TOZERO:еҰӮжһңsrc(x,y)>thresholdпјҢdst(x,y) = src(x,y) ; еҗҰеҲҷ dst(x,y) = 0гҖӮ
threshold_type=CV_THRESH_TOZERO_INV:еҰӮжһң src(x,y)>thresholdпјҢdst(x,y) = 0 ; еҗҰеҲҷdst(x,y) = src(x,y).
ж•ҲжһңеӣҫеҰӮдёӢпјҡ
еңЁзҹ©еҪўиҜҶеҲ«йҮҢйқўзҡ„дәҢеҖјеҢ–еӣҫпјҡ
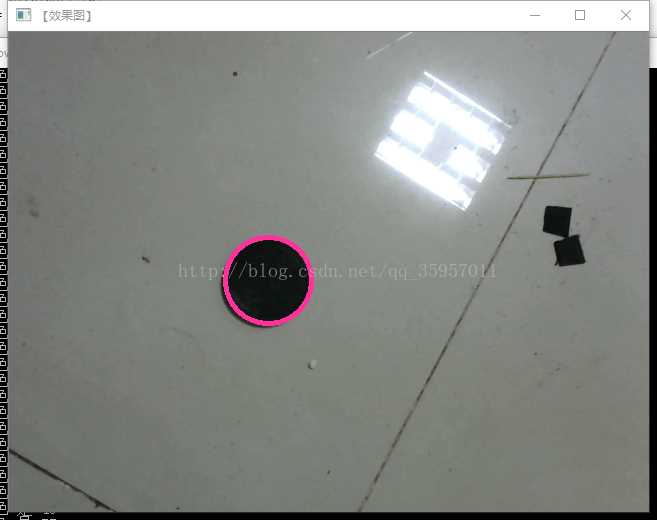
еңҶиҜҶеҲ«пјҡ
жәҗз Ғпјҡ
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <WINSOCK2.H>
#include<iostream>
#include<thread>
#include <winsock2.h>
#include <stdio.h>
#include<string>
#include <windows.h>
#pragma comment(lib,"ws2_32.lib")
#include<vector>
using namespace cv;
//////////////////////////////////////////////////////////////////
//еҮҪж•°еҠҹиғҪпјҡз”Ёеҗ‘йҮҸжқҘеҒҡCOSОұ=дёӨеҗ‘йҮҸд№Ӣз§Ҝ/дёӨеҗ‘йҮҸжЁЎзҡ„д№ҳз§ҜжұӮдёӨжқЎзәҝж®өеӨ№и§’
//иҫ“е…Ҙпјҡ зәҝж®ө3дёӘзӮ№еқҗж Үpt1,pt2,pt0,жңҖеҗҺдёҖдёӘеҸӮж•°дёәе…¬е…ұзӮ№
//иҫ“еҮәпјҡ зәҝж®өеӨ№и§’пјҢеҚ•дҪҚдёәи§’еәҰ
//////////////////////////////////////////////////////////////////
double angle(CvPoint* pt1, CvPoint* pt2, CvPoint* pt0)
{
double dx1 = pt1->x - pt0->x;
double dy1 = pt1->y - pt0->y;
double dx2 = pt2->x - pt0->x;
double dy2 = pt2->y - pt0->y;
double angle_line = (dx1*dx2 + dy1 * dy2) / sqrt((dx1*dx1 + dy1 * dy1)*(dx2*dx2 + dy2 * dy2) + 1e-10);//дҪҷејҰеҖј
return acos(angle_line) * 180 / 3.141592653;
}
//////////////////////////////////////////////////////////////////
//еҮҪж•°еҠҹиғҪпјҡйҮҮз”ЁеӨҡиҫ№еҪўжЈҖжөӢпјҢйҖҡиҝҮзәҰжқҹжқЎд»¶еҜ»жүҫзҹ©еҪў
//иҫ“е…Ҙпјҡ img еҺҹеӣҫеғҸ
// storage еӯҳеӮЁ
// minareaпјҢmaxarea жЈҖжөӢзҹ©еҪўзҡ„жңҖе°Ҹ/жңҖеӨ§йқўз§Ҝ
// minangle,maxangle жЈҖжөӢзҹ©еҪўиҫ№еӨ№и§’иҢғеӣҙпјҢеҚ•дҪҚдёәи§’еәҰ
//иҫ“еҮәпјҡ зҹ©еҪўеәҸеҲ—
//////////////////////////////////////////////////////////////////
CvSeq* findSquares4(IplImage* img, CvMemStorage* storage, int minarea, int maxarea, int minangle, int maxangle, int(&temp)[30])
{
CvSeq* contours;//иҫ№зјҳ
int N = 6; //йҳҲеҖјеҲҶзә§
CvSize sz = cvSize(img->width & -2, img->height & -2);
IplImage* timg = cvCloneImage(img);//жӢ·иҙқдёҖж¬Ўimg
IplImage* gray = cvCreateImage(sz, 8, 1); //imgзҒ°еәҰеӣҫ
IplImage* pyr = cvCreateImage(cvSize(sz.width / 2, sz.height / 2), 8, 3); //йҮ‘еӯ—еЎ”ж»Өжіў3йҖҡйҒ“еӣҫеғҸдёӯй—ҙеҸҳйҮҸ
IplImage* tgray = cvCreateImage(sz, 8, 1); ;
CvSeq* result;
double s, t;
int sk = 0;
CvSeq* squares = cvCreateSeq(0, sizeof(CvSeq), sizeof(CvPoint), storage);
cvSetImageROI(timg, cvRect(0, 0, sz.width, sz.height));
//йҮ‘еӯ—еЎ”ж»Өжіў
cvPyrDown(timg, pyr, 7);
cvPyrUp(pyr, timg, 7);
//еңЁ3дёӘйҖҡйҒ“дёӯеҜ»жүҫзҹ©еҪў
for (int c = 0; c < 3; c++) //еҜ№3дёӘйҖҡйҒ“еҲҶеҲ«иҝӣиЎҢеӨ„зҗҶ
{
cvSetImageCOI(timg, c + 1);
cvCopy(timg, tgray, 0); //дҫқж¬Ўе°ҶBGRйҖҡйҒ“йҖҒе…Ҙtgray
for (int l = 0; l < N; l++)
{
//дёҚеҗҢйҳҲеҖјдёӢдәҢеҖјеҢ–
cvThreshold(tgray, gray, 75, 250, CV_THRESH_BINARY);
cvShowImage("111", gray);
cvFindContours(gray, storage, &contours, sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE, cvPoint(0, 0));
while (contours)
{ //еӨҡиҫ№еҪўйҖјиҝ‘
result = cvApproxPoly(contours, sizeof(CvContour), storage, CV_POLY_APPROX_DP, cvContourPerimeter(contours)*0.02, 0);
//еҰӮжһңжҳҜеҮёеӣӣиҫ№еҪўе№¶дё”йқўз§ҜеңЁиҢғеӣҙеҶ…
if (result->total == 4 && fabs(cvContourArea(result, CV_WHOLE_SEQ)) > minarea && fabs(cvContourArea(result, CV_WHOLE_SEQ)) < maxarea && cvCheckContourConvexity(result))
{
s = 0;
//еҲӨж–ӯжҜҸдёҖжқЎиҫ№
for (int i = 0; i < 5; i++)
{
if (i >= 2)
{ //и§’еәҰ
t = fabs(angle((CvPoint*)cvGetSeqElem(result, i), (CvPoint*)cvGetSeqElem(result, i - 2), (CvPoint*)cvGetSeqElem(result, i - 1)));
s = s > t ? s : t;
}
}
//иҝҷйҮҢзҡ„Sдёәзӣҙи§’еҲӨе®ҡжқЎд»¶ еҚ•дҪҚдёәи§’еәҰ
if (s > minangle && s < maxangle)
{
for (int i = 0; i < 4; i++)
cvSeqPush(squares, (CvPoint*)cvGetSeqElem(result, i));
CvRect rect = cvBoundingRect(contours, 1); // иҺ·еҸ–зҹ©еҪўиҫ№з•ҢжЎҶ
CvPoint p1;
p1 = cvPoint(rect.x + rect.width / 2, rect.y + rect.height / 2); //зҹ©еҪўдёӯеҝғеқҗж Ү
std::cout << "X:" << p1.x << "Yпјҡ" << p1.y << std::endl;
}
}
contours = contours->h_next;
}
}
std::cout << "еңҶзҡ„ж•°йҮҸжҳҜ"<<sk << std::endl;
temp[26] = sk;
sk = 0;
}
cvReleaseImage(&gray);
cvReleaseImage(&pyr);
cvReleaseImage(&tgray);
cvReleaseImage(&timg);
return squares;
}
//////////////////////////////////////////////////////////////////
//еҮҪж•°еҠҹиғҪпјҡз”»еҮәжүҖжңүзҹ©еҪў
//иҫ“е…Ҙпјҡ img еҺҹеӣҫеғҸ
// squares зҹ©еҪўеәҸеҲ—
// wndname зӘ—еҸЈеҗҚз§°
//иҫ“еҮәпјҡ еӣҫеғҸдёӯж Үи®°зҹ©еҪў
//////////////////////////////////////////////////////////////////
void drawSquares(IplImage* img, CvSeq* squares, const char* wndname)
{
CvSeqReader reader;
IplImage* cpy = cvCloneImage(img);
CvPoint pt[4];
int i;
cvStartReadSeq(squares, &reader, 0);
for (i = 0; i < squares->total; i += 4)
{
CvPoint* rect = pt;
int count = 4;
memcpy(pt, reader.ptr, squares->elem_size);
CV_NEXT_SEQ_ELEM(squares->elem_size, reader);
memcpy(pt + 1, reader.ptr, squares->elem_size);
CV_NEXT_SEQ_ELEM(squares->elem_size, reader);
memcpy(pt + 2, reader.ptr, squares->elem_size);
CV_NEXT_SEQ_ELEM(squares->elem_size, reader);
memcpy(pt + 3, reader.ptr, squares->elem_size);
CV_NEXT_SEQ_ELEM(squares->elem_size, reader);
//cvPolyLine( cpy, &rect, &count, 1, 1, CV_RGB(0,255,0), 3, CV_AA, 0 );
cvPolyLine(cpy, &rect, &count, 1, 1, CV_RGB(rand() & 255, rand() & 255, rand() & 255), 1, CV_AA, 0);//еҪ©иүІз»ҳеҲ¶
}
cvShowImage("22", cpy);
cvReleaseImage(&cpy);
}
void SendMessageOne()
{
//ејҖиө·ж‘„еғҸеӨҙ
VideoCapture capture;
capture.open(0);
Mat edges; //е®ҡд№үиҪ¬еҢ–зҡ„зҒ°еәҰеӣҫ
if (!capture.isOpened())
namedWindow("гҖҗж•ҲжһңеӣҫгҖ‘", CV_WINDOW_NORMAL);
const char* winn = "1111";
if (!capture.isOpened())
//namedWindow(winn, CV_WINDOW_NORMAL);
CvMemStorage* storage = 0;
CvMemStorage* storage = 0;
storage = cvCreateMemStorage(0);
while (1)
{
int Y=0, J=0;
Mat frame;
capture >> frame;
IplImage img0 = frame;
//drawSquares(&img0, findSquares4(&img0, storage, 100, 2000, 80, 100, a), winn);
//cvClearMemStorage(storage); //жё…з©әеӯҳеӮЁ
Mat E = frame(Range(1, 320), Range(1, 240));
cvtColor(frame, edges, CV_BGR2GRAY);
//й«ҳж–Ҝж»Өжіў
GaussianBlur(edges, edges, Size(7, 7), 2, 2);
std::vector<Vec3f> circles;//еӯҳеӮЁжҜҸдёӘеңҶзҡ„дҪҚзҪ®дҝЎжҒҜ
//йңҚеӨ«еңҶ
HoughCircles(edges, circles, CV_HOUGH_GRADIENT, 1.5, 10, 100, 100, 0, 50);
for (size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
//std::cout << "еңҶзҡ„XжҳҜ" << circles[i][0] << "еңҶзҡ„YжҳҜ" << circles[i][1] << std:: endl;
//з»ҳеҲ¶еңҶиҪ®е»“
circle(frame, center, radius, Scalar(155, 50, 255), 3, 8, 0);
int R = frame.at<Vec3b>(cvRound(circles[i][1]), cvRound(circles[i][0]))[2];//R
int G = frame.at<Vec3b>(cvRound(circles[i][1]), cvRound(circles[i][0]))[1];//G
int B = frame.at<Vec3b>(cvRound(circles[i][1]), cvRound(circles[i][0]))[0];//B
int num = R + G + B;
std::cout << "еңҶеҝғйўңиүІжҳҜ" << num << std::endl;
}
imshow("гҖҗж•ҲжһңеӣҫгҖ‘", frame);
waitKey(30);
}
}
int main()
{
std::thread *a = new std::thread(SendMessageOne);
a->join();
return 0;
}д»ҘдёҠе°ұжҳҜдҪҝз”ЁOpenCVжҖҺд№ҲиҜҶеҲ«еңҶдёҺзҹ©еҪўпјҢе°Ҹзј–зӣёдҝЎжңүйғЁеҲҶзҹҘиҜҶзӮ№еҸҜиғҪжҳҜжҲ‘们ж—Ҙеёёе·ҘдҪңдјҡи§ҒеҲ°жҲ–з”ЁеҲ°зҡ„гҖӮеёҢжңӣдҪ иғҪйҖҡиҝҮиҝҷзҜҮж–Үз« еӯҰеҲ°жӣҙеӨҡзҹҘиҜҶгҖӮжӣҙеӨҡиҜҰжғ…敬иҜ·е…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“гҖӮ





