这篇文章将为大家详细讲解有关OpenCV中霍夫变换直线检测的示例分析,小编觉得挺实用的,因此分享给大家做个参考,希望大家阅读完这篇文章后可以有所收获。
霍夫变换(Hough Transform)的主要思想:
一条直线在平面直角坐标系(x-y)中可以用y=ax+b式表示,对于直线上一个确定的点(x0,y0),总符合y0-ax0=b,而它可以表示为参数平面坐标系(a-b)中的一条直线。因此,图像中的一个点对应参数平面的一条直线,同样,图像中的一条直线对应参数平面上的一个点。
基本Hough变换检测直线:
由于同一条直线上的不同点在参数平面中是会经过同一个点的多条线。对图像的所有点作霍夫变换,检测直线就意味着找到对应参数平面中的直线相交最多的点。对这些交点做票数累计,然后取出票数大于最小投票数的点,即为原坐标系里检测出的直线。
一般,直线的参数方程为 ρ=xcosθ+ysinθ
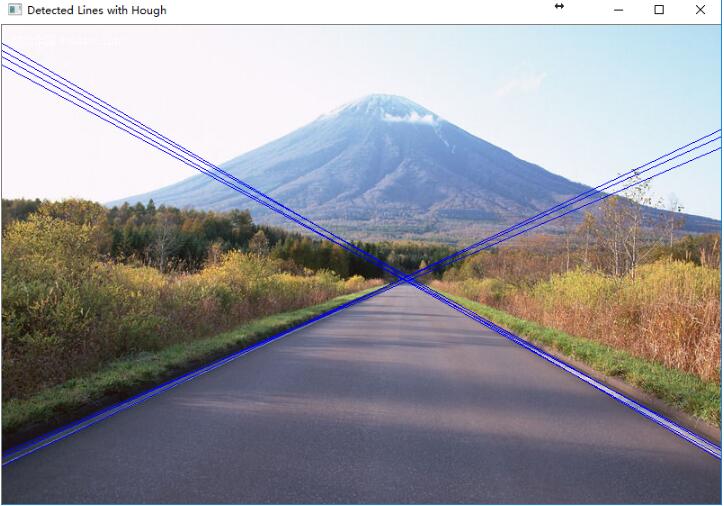
OpenCV中的基本霍夫变换直线检测函数 cv::HoughLines:
函数输入为一幅二值图像(有很多待检测点),其中一些点排列后形成直线,通常这是一幅边缘图像,比如来自Sobel算子或Canny算子。函数的输出是cv::Vec2f的向量,每个元素都是一对代表检测到的直线的浮点数(ρ, θ)。函数的作法是先求出原图像中每点的极坐标方程,若相交于一点的极坐标曲线的个数大于最小投票数,则将该点(ρ, θ)(参数坐标系点)放入输出向量。
#include "opencv2/highgui.hpp"
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
#define PI 3.1415926
class LineFinder{
private:
std::vector<cv::Vec2f> lines;
double deltaRho; // 参数坐标系的步长(theta表示与直线垂直的角度)
double deltaTheta;
int minVote; // 判断是直线的最小投票数
public:
LineFinder() {
deltaRho = 1;
deltaTheta = PI / 180;
minVote = 80;
}
void setAccResolution(double dRho, double dTheta) {
deltaRho = dRho;
deltaTheta = dTheta;
}
void setMinVote(int minv) {
minVote = minv;
}
// Hough变换检测直线;rho=1,theta=PI/180参数坐标系里的步长,threshold=最小投票数
void findLines(cv::Mat& binary){
lines.clear();
cv::HoughLines(binary, lines, deltaRho, deltaTheta, minVote);
}
void drawDetectedLines(cv::Mat& result){
std::vector<cv::Vec2f>::const_iterator it = lines.begin();
while (it != lines.end())
{
// 以下两个参数用来检测直线属于垂直线还是水平线
float rho = (*it)[0];
float theta = (*it)[1];
if (theta < PI / 4. || theta > 3.*PI / 4.)
{ // 若检测为垂直线,直线交于图片的上下两边,先找交点
cv::Point pt1(rho / cos(theta), 0);
cv::Point pt2((rho - result.rows*sin(theta)) / cos(theta), result.rows);
cv::line(result, pt1, pt2, cv::Scalar(255), 1); //
}
else // 若检测为水平线,直线交于图片的左右两边,先找交点
{
cv::Point pt1(0, rho / sin(theta));
cv::Point pt2(result.cols, (rho - result.cols*cos(theta)) / sin(theta));
cv::line(result, pt1, pt2, cv::Scalar(255), 1);
}
++it;
}
}
};
int main(int argc, char *argv[])
{
cv::Mat image = cv::imread("D:/VS_exercise/images/road1.jpg");
cv::Mat imageGray;
cv::Mat contours;
cv::cvtColor(image, imageGray, cv::COLOR_RGB2GRAY);
cv::Canny(imageGray, contours, 190, 300);
// 在原图的拷贝上画直线
cv::Mat result(contours.rows, contours.cols, CV_8U, cv::Scalar(255));
image.copyTo(result);
// Hough变换检测
LineFinder finder;
finder.setMinVote(130);
finder.findLines(contours);
finder.drawDetectedLines(result);
// 显示
cv::namedWindow("Detected Lines with Hough");
cv::imshow("Detected Lines with Hough", result);
cv::waitKey(0);
return 0;
}
概率Hough变换检测线段:
霍夫变换检测直线的目的,是找到二值图像中经过足够多数量点的所有直线,当同一直线穿过许多点,便意味着这条线的存在足够明显。
概率霍夫变换在原算法的基础上增加了一些改动,主要是:
1. 不再系统地逐行扫描图像,而是随机挑选(轮廓图像的)前景点,一旦累加器中的某一项交点的票数达到给定的最小值,就搜索轮廓图像在对应直线上的前景点,连成线段(要小于maxLineGap),然后记录线段参数(起终点),最后删除所有经过的点(即使它们并未投过票)。
2. 概率霍夫变换定义了两个额外的参数:一个是可以接受的最小线段长度(minLineLength),另一个是允许组成连续线段的最大像素间隔(maxLineGap),虽然额外步骤增加了算法的复杂度,但由于参与投票的点数有所减少,因此得到了一些补偿。
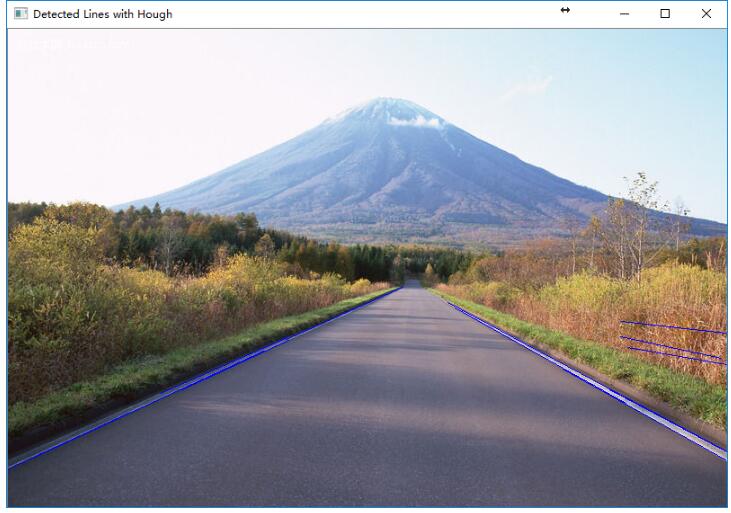
openCV中的概率霍夫变换直线检测函数 cv::HoughLinesP:
函数的输出是cv::Vec4i组成的向量,每个元素是检测到的线段的两个坐标点(pt1x, pt1y, pt2x, pt2y)。
#include "opencv2/highgui.hpp"
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#define PI 3.1415926
class LineFinder{
private:
std::vector<cv::Vec4i> lines;
double deltaRho; // 步长(theta表示与直线垂直的角度)
double deltaTheta;
int minVote; // 判断是直线的最小投票数
double minLength; // 判断是直线的最小线段长度
double maxGap; // 允许组成连续线段的最大像素间隔
public:
LineFinder() {
deltaRho = 1;
deltaTheta = PI / 180;
minVote = 10;
minLength = 0.0;
maxGap = 0.0;
}
void setAccResolution(double dRho, double dTheta) {
deltaRho = dRho;
deltaTheta = dTheta;
}
void setMinVote(int minv) {
minVote = minv;
}
void setLineLengthAndGap(double length, double gap) {
minLength = length;
maxGap = gap;
}
// Hough变换检测线段
void findLines(cv::Mat& binary) {
lines.clear();
cv::HoughLinesP(binary, lines, deltaRho, deltaTheta, minVote, minLength, maxGap);
}
void drawDetectedLines(cv::Mat &image, cv::Scalar color = cv::Scalar(255)) {
std::vector<cv::Vec4i>::const_iterator it2 = lines.begin();
while (it2 != lines.end()) {
cv::Point pt1((*it2)[0], (*it2)[1]);
cv::Point pt2((*it2)[2], (*it2)[3]);
cv::line(image, pt1, pt2, color, 1.5); //画线段
++it2;
}
}
};
int main(int argc, char *argv[])
{
cv::Mat image = cv::imread("D:/VS_exercise/images/road1.jpg");
cv::Mat imageGray;
cv::Mat contours;
cv::cvtColor(image, imageGray, cv::COLOR_RGB2GRAY);
// 边缘检测
cv::Canny(imageGray, contours, 190, 300);
// Hough变换检测
LineFinder finder;
finder.setMinVote(80);
finder.setLineLengthAndGap(100, 10); //概率Hough变换增加的两个参数
finder.findLines(contours);
finder.drawDetectedLines(image);
// 显示
cv::imshow("Detected Lines with Hough", image);
cv::waitKey(0);
return 0;
}
关于“OpenCV中霍夫变换直线检测的示例分析”这篇文章就分享到这里了,希望以上内容可以对大家有一定的帮助,使各位可以学到更多知识,如果觉得文章不错,请把它分享出去让更多的人看到。
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



