如何进行RK3399 camera驱动开发,很多新手对此不是很清楚,为了帮助大家解决这个难题,下面小编将为大家详细讲解,有这方面需求的人可以来学习下,希望你能有所收获。
概述
目前板子上有两路mipi rx,可以接双摄像头。
DTS配置
1、Enabled isp
&isp0 { status = "okay";};&isp1 { status = "okay";};&isp0_mmu { status = "okay";};&isp1_mmu { status = "okay";};2、Enabled mipi对应的i2c
&i2c1 { status = "okay";};camera驱动(默认为OV9750)
1、android 驱动代码路径
hardware/rockchip/camera/SiliconImage/isi/drv/OV9750_A
2、编译生成的libisp_isi_drv_OV9750_A.so 放置于/vendor/lib/hw
3、cp hardware/rockchip/camera/SiliconImage/isi/drv/OV9750_A/calib/ OV9750_A.xml /vendor/etc/
4、cp hardware/rockchip/camera/Config/cam_board_rk3399.xml /vendor/etc/cam_board.xml
xml 配置
1、根据电路图为camera上电,并配置rst,pdn,以下按mipi0配置电压以及相关gpio,I2C通道(1),mipi phy 通道(0),IO 电压 1.8v、CORE电压1.8v、模拟电压:3.2v,具体请看电路图、以及OV9750 datasheet。
概述
RK3399Pro toybrick 开发板分别带有两个MIPI,一个DVP摄像头接口,MIPI支持最高4K拍照,并支持 1080P 30fps以上视频录制。此外,开发板还支持 USB 摄像头。
本文以 OV9750 摄像头为例,讲解在该开发板上的配置过程。
配置原理
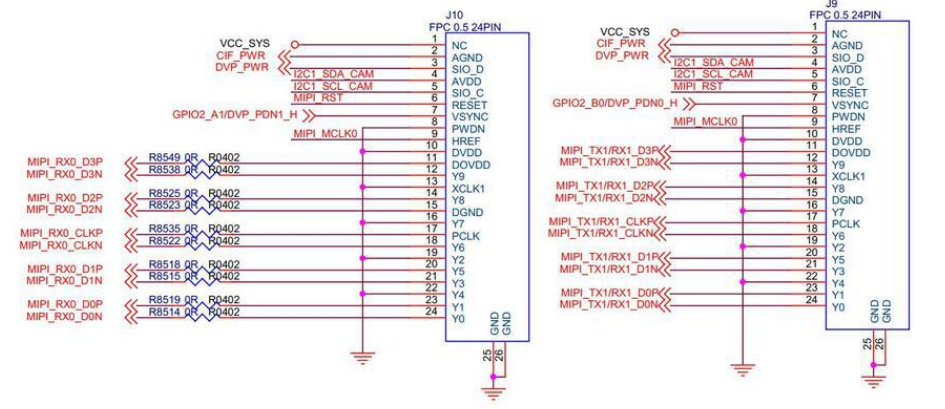
由以下电路图可知,两路MIPI摄像头连接的是不同的ISP和I2C通道。
MIPI0:使用ISP0和I2C1,还需配置MIPI_MCLK0、MIPI_PDN、MIPI_RST
MIPI1:使用ISP1和I2C2,还需配置MIPI_MCLK_T2、JMIPI_PDN2、JMIPI_RST2

DTS配置
配置isp节点
cif_isp0: cif_isp@ff910000 { compatible = "rockchip,rk3399-cif-isp"; rockchip,grf = <&grf>; reg = <0x0 0xff910000 0x0 0x4000>, <0x0 0xff968000 0x0 0x8000>; reg-names = "register", "dsihost-register"; clocks = <&cru ACLK_ISP0_NOC>, <&cru ACLK_ISP0_WRAPPER>, <&cru HCLK_ISP0_NOC>, <&cru HCLK_ISP0_WRAPPER>, <&cru SCLK_ISP0>, <&cru SCLK_DPHY_RX0_CFG>, <&cru SCLK_CIF_OUT>, <&cru SCLK_CIF_OUT>, <&cru SCLK_MIPIDPHY_REF>; clock-names = "aclk_isp0_noc", "aclk_isp0_wrapper", "hclk_isp0_noc", "hclk_isp0_wrapper", "clk_isp0", "pclk_dphyrx", "clk_cif_out", "clk_cif_pll", "pclk_dphy_ref"; interrupts = <GIC_SPI 43 IRQ_TYPE_LEVEL_HIGH 0>; interrupt-names = "cif_isp10_irq"; power-domains = <&power RK3399_PD_ISP0>; rockchip,isp,iommu-enable = <1>; iommus = <&isp0_mmu>; status = "disabled"; };&isp0 { status = "okay"; }; &isp0_mmu { status = "okay"; };&cif_isp0 { rockchip,camera-modules-attached = <&camera0>; status = "okay";};设置CPU MCLK引脚功能
&pinctrl {/* */ cam_mclk { cam_default_pins: cam-default-pins { rockchip,pins = <2 11 RK_FUNC_3 &pcfg_pull_none>; }; }; };在i2c上配置camera节点,mipi0 camera连接到i2c1上
&i2c1 { status = "okay"; /* 使能i2c1 */ /* * 一般写成cameraX:camera-module@ID,其中X为序号,ID为camera的7bit I2C地址 * camera0表示节点名,绑定isp节点时,将camera0 attach到isp0 */ camera0: camera-module@10 { status = "okay"; compatible = "omnivision,ov9750-v4l2-i2c-subdev"; reg = <0x10>; /* 7bit I2C地址 */ device_type = "v4l2-i2c-subdev"; /* 无需修改 */ clocks = <&cru SCLK_CIF_OUT>; /* 无需修改,时钟源选择 */ clock-names = "clk_cif_out"; /* 无需修改,时钟源名字 */ pinctrl-names = "default"; /* 无需修改,通过pinctrl配置MCLK引脚 */ pinctrl-0 = <&cam_default_pins>; /* 无需修改,与上文的pinctrl定义一致 */ rockchip,pd-gpio = <&gpio4 RK_PD1 GPIO_ACTIVE_LOW>; /* PD管脚分配及有效电平 */ rockchip,rst-gpio = <&gpio4 RK_PD2 GPIO_ACTIVE_LOW>; /* RST管脚分配及有效电平 */ rockchip,camera-module-mclk-name = "clk_cif_out"; /* 无需修改 */ rockchip,camera-module-facing = "back"; //前后置配置 rockchip,camera-module-name = "MDG001"; //Camera 模组名称 rockchip,camera-module-len-name = "NONE"; //Camera 模组镜头 rockchip,camera-module-fov-h = "80"; //模组水平可视角度配置 rockchip,camera-module-fov-v = "65"; //模组垂直可视角度配置 rockchip,camera-module-orientation = <0>; //模组角度设置 rockchip,camera-module-iq-flip = <0>; //IQ 上下翻转 rockchip,camera-module-iq-mirror = <0>; //IQ 左右镜像 //以上 2 个属性控制摄像头的效果参数镜像配置,一般都是设置成 0,但是发现以下现象:拍摄白墙,图片的上半部偏色与下半部偏色不一致,或者左右半部偏不一致,即可以将这2个属性置成1。 rockchip,camera-module-flip = <1>; rockchip,camera-module-mirror = <1>; //以上 2 个属性控制摄像头驱动中的镜像配置,如果图像旋转 180 度,可以将这 2 个属性修改成相反的值即可旋转 180。 rockchip,camera-module-defrect0 = <1280 960 0 0 1280 960>; //根据摄像头分辨率进行设置 rockchip,camera-module-flash-support = <0>; //闪光灯支持 rockchip,camera-module-mipi-dphy-index = <0>; //mipi口配置,根据物理连接定义 as-master = <0>; };};驱动说明
与摄像头相关的代码目录如下:
drivers/media/i2c/soc_camera/rockchip|-- ov9750_v4l2-i2c-subdev.c // OV9750驱动|-- ov_camera_module.c // OV系列公共函数|-- ov_camera_module.h //|-- rk_camera_mclk.c // RK Camera MCLK时钟信号管理|-- rk_camera_mclk.h|-- rk_camera_module.c // RK 系列公共函数`-- rk_camera_module_version.h //模块版本信息看完上述内容是否对您有帮助呢?如果还想对相关知识有进一步的了解或阅读更多相关文章,请关注亿速云行业资讯频道,感谢您对亿速云的支持。
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。
原文链接:http://blog.itpub.net/69948385/viewspace-2657649/



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



