这篇文章给大家介绍如何改进YOLOv3进行红外小目标检测,内容非常详细,感兴趣的小伙伴们可以参考借鉴,希望对大家能有所帮助。
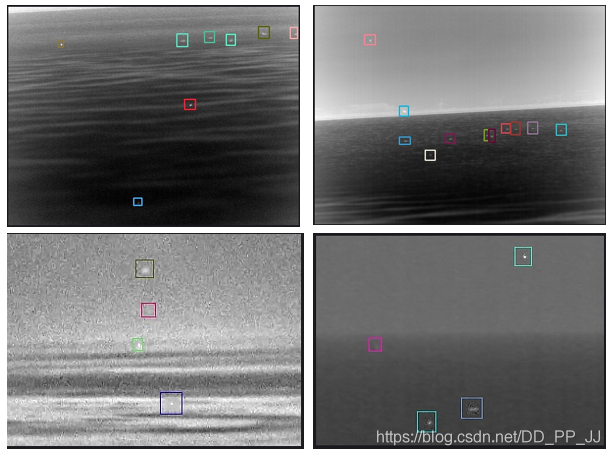
红外小目标检测的目标比较小,目标极其容易和其他物体混淆,有一定的挑战性。
另外,这本质上也是一个小目标领域的问题,很多适用于小目标的创新点也会被借鉴进来。

此外,该数据集还有一个特点,就是分背景,虽然同样是检测红外小目标,区别是背景的不同,我们对数据集进行了统计以及通过人工翻看的方式总结了其特点,如下表所示:
| 背景类别 | 数量 | 特点 | 数据难度 | 测试mAP+F1 | 建议 |
|---|---|---|---|---|---|
| trees | 581 | 背景干净,目标明显,数量较多 | 低 | 0.99+0.97 | 无 |
| cloudless_sky | 1320 | 背景干净,目标明显,数量多 | 低 | 0.98+0.99 | 无 |
| architecture | 506 | 背景变化较大,目标形态变化较大,数量较多 | 一般 | 0.92+0.96 | focal loss |
| continuous_cloud_sky | 878 | 背景干净,目标形态变化不大,但个别目标容易会发生和背景中的云混淆 | 一般 | 0.93+0.95 | focal loss |
| complex_cloud | 561 | 目标形态基本无变化,但背景对目标的定位影响巨大 | 较难 | 0.85+0.89 | focal loss |
| sea | 17 | 背景干净,目标明显,数量极少 | 一般 | 0.87+0.88 | 生成高质量新样本,可以让其转为简单样本(Mixup) |
| sea_sky | 45 | 背景变化较大,且单张图像中目标个数差异变化大,有密集的难点,且数量少 | 困难 | 0.68+0.77 | paste策略 |
通过以上结果,可以看出背景的不同对结果影响还是蛮大的,最后一列也给出了针对性的建议,打算后续实施。
首先,我们使用的是U版的yolov3: https://github.com/ultralytics/yolov3,那时候YOLOv4/5、PPYOLO还都没出,当时出了一个《从零开始学习YOLOv3》就是做项目的时候写的电子书,其中的在YOLOv3中添加注意力机制那篇很受欢迎(可以水很多文章出来,毕业要紧:)
我们项目的代码以及修改情况可以查看:https://github.com/GiantPandaCV/yolov3-point
将数据集转成VOC格式的数据集,之前文章有详细讲述如何转化为标准的VOC数据集,以及如何将VOC格式数据集转化为U版的讲解。当时接触到几个项目,都需要用YOLOv3,由于每次都需要转化,大概分别调用4、5个脚本吧,感觉很累,所以当时花了一段时间构建了一个一键从VOC转U版YOLOv3格式的脚本库: https://github.com/pprp/voc2007_for_yolo_torch。
到此时为止,我们项目就已经可以运行了,然后就是很多细节调整了。
红外小目标的Anchor和COCO等数据集的Anchor是差距很大的,为了更好更快速的收敛,采用了BBuf总结的一套专门计算Anchor的脚本:
#coding=utf-8import xml.etree.ElementTree as ETimport numpy as np def iou(box, clusters): """ 计算一个ground truth边界盒和k个先验框(Anchor)的交并比(IOU)值。 参数box: 元组或者数据,代表ground truth的长宽。 参数clusters: 形如(k,2)的numpy数组,其中k是聚类Anchor框的个数 返回:ground truth和每个Anchor框的交并比。 """ x = np.minimum(clusters[:, 0], box[0]) y = np.minimum(clusters[:, 1], box[1]) if np.count_nonzero(x == 0) > 0 or np.count_nonzero(y == 0) > 0: raise ValueError("Box has no area") intersection = x * y box_area = box[0] * box[1] cluster_area = clusters[:, 0] * clusters[:, 1] iou_ = intersection / (box_area + cluster_area - intersection) return iou_def avg_iou(boxes, clusters): """ 计算一个ground truth和k个Anchor的交并比的均值。 """ return np.mean([np.max(iou(boxes[i], clusters)) for i in range(boxes.shape[0])])def kmeans(boxes, k, dist=np.median): """ 利用IOU值进行K-means聚类 参数boxes: 形状为(r, 2)的ground truth框,其中r是ground truth的个数 参数k: Anchor的个数 参数dist: 距离函数 返回值:形状为(k, 2)的k个Anchor框 """ # 即是上面提到的r rows = boxes.shape[0] # 距离数组,计算每个ground truth和k个Anchor的距离 distances = np.empty((rows, k)) # 上一次每个ground truth"距离"最近的Anchor索引 last_clusters = np.zeros((rows,)) # 设置随机数种子 np.random.seed() # 初始化聚类中心,k个簇,从r个ground truth随机选k个 clusters = boxes[np.random.choice(rows, k, replace=False)] # 开始聚类 while True: # 计算每个ground truth和k个Anchor的距离,用1-IOU(box,anchor)来计算 for row in range(rows): distances[row] = 1 - iou(boxes[row], clusters) # 对每个ground truth,选取距离最小的那个Anchor,并存下索引 nearest_clusters = np.argmin(distances, axis=1) # 如果当前每个ground truth"距离"最近的Anchor索引和上一次一样,聚类结束 if (last_clusters == nearest_clusters).all(): break # 更新簇中心为簇里面所有的ground truth框的均值 for cluster in range(k): clusters[cluster] = dist(boxes[nearest_clusters == cluster], axis=0) # 更新每个ground truth"距离"最近的Anchor索引 last_clusters = nearest_clusters return clusters# 加载自己的数据集,只需要所有labelimg标注出来的xml文件即可def load_dataset(path): dataset = [] for xml_file in glob.glob("{}/*xml".format(path)): tree = ET.parse(xml_file) # 图片高度 height = int(tree.findtext("./size/height")) # 图片宽度 width = int(tree.findtext("./size/width")) for obj in tree.iter("object"): # 偏移量 xmin = int(obj.findtext("bndbox/xmin")) / width ymin = int(obj.findtext("bndbox/ymin")) / height xmax = int(obj.findtext("bndbox/xmax")) / width ymax = int(obj.findtext("bndbox/ymax")) / height xmin = np.float64(xmin) ymin = np.float64(ymin) xmax = np.float64(xmax) ymax = np.float64(ymax) if xmax == xmin or ymax == ymin: print(xml_file) # 将Anchor的长宽放入dateset,运行kmeans获得Anchor dataset.append([xmax - xmin, ymax - ymin]) return np.array(dataset) if __name__ == '__main__': ANNOTATIONS_PATH = "F:\Annotations" #xml文件所在文件夹 CLUSTERS = 9 #聚类数量,anchor数量 INPUTDIM = 416 #输入网络大小 data = load_dataset(ANNOTATIONS_PATH) out = kmeans(data, k=CLUSTERS) print('Boxes:') print(np.array(out)*INPUTDIM) print("Accuracy: {:.2f}%".format(avg_iou(data, out) * 100)) final_anchors = np.around(out[:, 0] / out[:, 1], decimals=2).tolist() print("Before Sort Ratios:\n {}".format(final_anchors)) print("After Sort Ratios:\n {}".format(sorted(final_anchors)))通过浏览脚本就可以知道,Anchor和图片的输入分辨率有没有关系 这个问题了,当时这个问题有很多群友都在问。通过kmeans函数得到的结果实际上是归一化到0-1之间的,然后Anchor的输出是在此基础上乘以输入分辨率的大小。所以个人认为Anchor和图片的输入分辨率是有关系的。
此外,U版也提供了Anchor计算,如下:
def kmean_anchors(path='./2007_train.txt', n=5, img_size=(416, 416)): # from utils.utils import *; _ = kmean_anchors() # Produces a list of target kmeans suitable for use in *.cfg files from utils.datasets import LoadImagesAndLabels thr = 0.20 # IoU threshold def print_results(thr, wh, k): k = k[np.argsort(k.prod(1))] # sort small to large iou = wh_iou(torch.Tensor(wh), torch.Tensor(k)) max_iou, min_iou = iou.max(1)[0], iou.min(1)[0] bpr, aat = (max_iou > thr).float().mean(), ( iou > thr).float().mean() * n # best possible recall, anch > thr print('%.2f iou_thr: %.3f best possible recall, %.2f anchors > thr' % (thr, bpr, aat)) print( 'kmeans anchors (n=%g, img_size=%s, IoU=%.3f/%.3f/%.3f-min/mean/best): ' % (n, img_size, min_iou.mean(), iou.mean(), max_iou.mean()), end='') for i, x in enumerate(k): print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfg return k def fitness(thr, wh, k): # mutation fitness iou = wh_iou(wh, torch.Tensor(k)).max(1)[0] # max iou bpr = (iou > thr).float().mean() # best possible recall return iou.mean() * bpr # product # Get label wh wh = [] dataset = LoadImagesAndLabels(path, augment=True, rect=True, cache_labels=True) nr = 1 if img_size[0] == img_size[1] else 10 # number augmentation repetitions for s, l in zip(dataset.shapes, dataset.labels): wh.append(l[:, 3:5] * (s / s.max())) # image normalized to letterbox normalized wh wh = np.concatenate(wh, 0).repeat(nr, axis=0) # augment 10x wh *= np.random.uniform(img_size[0], img_size[1], size=(wh.shape[0], 1)) # normalized to pixels (multi-scale) # Darknet yolov3.cfg anchors use_darknet = False if use_darknet: k = np.array([[10, 13], [16, 30], [33, 23], [30, 61], [62, 45], [59, 119], [116, 90], [156, 198], [373, 326]]) else: # Kmeans calculation from scipy.cluster.vq import kmeans print('Running kmeans for %g anchors on %g points...' % (n, len(wh))) s = wh.std(0) # sigmas for whitening k, dist = kmeans(wh / s, n, iter=30) # points, mean distance k *= s k = print_results(thr, wh, k) # Evolve wh = torch.Tensor(wh) f, ng = fitness(thr, wh, k), 2000 # fitness, generations for _ in tqdm(range(ng), desc='Evolving anchors'): kg = ( k.copy() * (1 + np.random.random() * np.random.randn(*k.shape) * 0.30)).clip( min=2.0) fg = fitness(thr, wh, kg) if fg > f: f, k = fg, kg.copy() print_results(thr, wh, k) k = print_results(thr, wh, k) return k这个和超参数搜索那篇采用的方法类似,也是一种类似遗传算法的方法,通过一代一代的筛选找到合适的Anchor。以上两种方法笔者并没有对比,有兴趣可以试试这两种方法,对比看看。
Anchor这方面设置了三个不同的数量进行聚类:
3 anchor:
13, 18, 16, 22, 19, 25
6 anchor:
12,17, 14,17, 15,19, 15,21, 13,20, 19,24
9 anchor:
10,16, 12,17, 13,20, 13,22, 15,18, 15,20, 15,23, 18,23, 21,26
由于数据集是单类的,并且相对VOC等数据集来看,比较单一,所以不打算使用Darknet53这样的深度神经网络,采用的Baseline是YOLOv3-tiny模型,在使用原始Anchor的情况下,该模型可以在验证集上达到mAP@0.5=93.2%,在测试集上达到mAP@0.5=0.869的结果。
那接下来换Anchor,用上一节得到的新Anchor替换掉原来的Anchor,该改掉的模型为yolov3-tiny-6a:
| Epoch | Model | P | R | mAP@0.5 | F1 | dataset |
|---|---|---|---|---|---|---|
| baseline | yolov3-tiny原版 | 0.982 | 0.939 | 0.932 | 0.96 | valid |
| baseline | yolov3-tiny原版 | 0.96 | 0.873 | 0.869 | 0.914 | test |
| 6a | yolov3-tiny-6a | 0.973 | 0.98 | 0.984 | 0.977 | valid |
| 6a | yolov3-tiny-6a | 0.936 | 0.925 | 0.915 | 0.931 | test |
可以看到几乎所有的指标都提升了,这说明Anchor先验的引入是很有必要的。
上边已经分析过了,背景对目标检测的结果还是有一定影响的,所以我们先后使用了几种方法进行改进。
第一个:过采样
通过统计不同背景的图像的数量,比如以sea为背景的图像只有17张,而最多的cloudless_sky为背景的图像有1300+张,这就产生了严重的不平衡性。显然cloudless_sky为背景的很简单,sea为背景的难度更大,这样由于数据不平衡的原因,训练得到的模型很可能也会在cloudless_sky这类图片上效果很好,在其他背景下效果一般。
所以首先要采用过采样的方法,这里的过采样可能和别的地方的不太一样,这里指的是将某些背景数量小的图片通过复制的方式扩充。
| Epoch | Model | P | R | mAP@0.5 | F1 | dataset |
|---|---|---|---|---|---|---|
| baseline(os) | yolov3-tiny原版 | 0.985 | 0.971 | 0.973 | 0.978 | valid |
| baseline(os) | yolov3-tiny原版 | 0.936 | 0.871 | 0.86 | 0.902 | test |
| baseline | yolov3-tiny原版 | 0.982 | 0.939 | 0.932 | 0.96 | valid |
| baseline | yolov3-tiny原版 | 0.96 | 0.873 | 0.869 | 0.914 | test |
:( 可惜实验结果不支持想法,一起分析一下。ps:os代表over sample
然后进行分背景测试,结果如下:
均衡后的分背景测试
| data | num | model | P | R | mAP | F1 |
|---|---|---|---|---|---|---|
| trees | 506 | yolov3-tiny-6a | 0.924 | 0.996 | 0.981 | 0.959 |
| sea_sky | 495 | yolov3-tiny-6a | 0.927 | 0.978 | 0.771 | 0.85 |
| sea | 510 | yolov3-tiny-6a | 0.923 | 0.935 | 0.893 | 0.929 |
| continuous_cloud_sky | 878 | yolov3-tiny-6a | 0.957 | 0.95 | 0.933 | 0.953 |
| complex_cloud | 561 | yolov3-tiny-6a | 0.943 | 0.833 | 0.831 | 0.885 |
| cloudless_sky | 1320 | yolov3-tiny-6a | 0.993 | 0.981 | 0.984 | 0.987 |
| architecture | 506 | yolov3-tiny-6a | 0.959 | 0.952 | 0.941 | 0.955 |
从分背景结果来看,确实sea训练数据很少的结果很好,mAP提高了2个点,但是complex_cloud等mAP有所下降。总结一下就是对于训练集中数据很少的背景类mAP有提升,但是其他本身数量就很多的背景mAP略微下降或者保持。
第二个:在图片中任意位置复制小目标
修改后的版本地址:https://github.com/pprp/SimpleCVReproduction/tree/master/SmallObjectAugmentation
具体实现思路就是,先将所有小目标抠出来备用。然后在图像上复制这些小目标,要求两两之间重合率不能达到一个阈值并且复制的位置不能超出图像边界。
效果如下:(这个是示意图,比较夸张,复制的个数比较多
这种做法来自当时比较新的论文《Augmentation for small object detection》,文中最好的结果是复制了1-2次。实际我们项目中也试过1次、2次、3次到多次的结果,都不尽如人意,结果太差就没有记录下来。。(话说论文中展示的效果最佳组合是原图+增强后的图,并且最好的结果也就提高了1个百分点)╮(╯﹏╰)╭
修改Backbone经常被群友问到这样一件事,修改骨干网络以后无法加载预训练权重了,怎么办?
有以下几个办法:
干脆不加载,从头训练,简单问题(比如红外小目标)从头收敛效果也不次于有预训练权重的。
不想改代码的话,可以选择修改Backbone之后、YOLO Head之前的部分(比如SPP的位置属于这种情况)
能力比较强的,可以改一下模型加载部分代码,跳过你新加入的模块,这样也能加载(笔者没试过,别找我)。
修改Backbone我们也从几个方向入的手,分为注意力模块、即插即用模块、修改FPN、修改激活函数、用成熟的网络替换backbone和SPP系列。
1. 注意力模块
这个项目中使用的注意力模块,大部分都在公号上写过代码解析,感兴趣的可以翻看一下。笔者前一段时间公布了一个电子书《卷积神经网络中的即插即用模块》也是因为这个项目中总结了很多注意力模块,所以开始整理得到的结果。具体模块还在继续更新:https://github.com/pprp/SimpleCVReproduction
当时实验的模块有:SE、CBAM等,由于当时Baseline有点高,效果并不十分理想。(注意力模块插进来不可能按照预期一下就提高多少百分点,需要多调参才有可能超过原来的百分点)根据群友反馈,SE直接插入成功率比较高。笔者在一个目标检测比赛中见到有一个大佬是在YOLOv3的FPN的三个分支上各加了一个CBAM,最终超过Cascade R-CNN等模型夺得冠军。
2. 即插即用模块
注意力模块也属于即插即用模块,这部分就说的是非注意力模块的部分如 FFM、ASPP、PPM、Dilated Conv、SPP、FRB、CorNerPool、DwConv、ACNet等,效果还可以,但是没有超过当前最好的结果。
3. 修改FPN
FPN这方面花了老久时间,参考了好多版本才搞出了一个dt-6a-bifpn(dt代表dim target红外目标;6a代表6个anchor),令人失望的是,这个BiFPN效果并不好,测试集上效果更差了。可能是因为实现的cfg有问题,欢迎反馈。
大家都知道通过改cfg的方式改网络结构是一件很痛苦的事情,推荐一个可视化工具:
https://lutzroeder.github.io/netron/
除此以外,为了方便查找行数,笔者写了一个简单脚本用于查找行数(献丑了
import osimport shutilcfg_path = "./cfg/yolov3-dwconv-cbam.cfg"save_path = "./cfg/preprocess_cfg/"new_save_name = os.path.join(save_path,os.path.basename(cfg_path))f = open(cfg_path, 'r')lines = f.readlines()# 去除以#开头的,属于注释部分的内容# lines = [x for x in lines if x and not x.startswith('#')]# lines = [x.rstrip().lstrip() for x in lines]lines_nums = []layers_nums = []layer_cnt = -1for num, line in enumerate(lines): if line.startswith('['): layer_cnt += 1 layers_nums.append(layer_cnt) lines_nums.append(num+layer_cnt) print(line) # s = s.join("") # s = s.join(line)for i,num in enumerate(layers_nums): print(lines_nums[i], num) lines.insert(lines_nums[i]-1, '# layer-%d\n' % (num-1))fo = open(new_save_name, 'w')fo.write(''.join(lines))fo.close()f.close()我们也尝试了只用一个、两个和三个YOLO Head的情况,结果是3>2>1,但是用3个和2个效果几乎一样,差异不大小数点后3位的差异,所以还是选用两个YOLO Head。
4. 修改激活函数
YOLO默认使用的激活函数是leaky relu,激活函数方面使用了mish。效果并没有提升,所以无疾而终了。
5. 用成熟的网络替换backbone
这里使用了ResNet10(第三方实现)、DenseNet、BBuf修改的DenseNet、ENet、VOVNet(自己改的)、csresnext50-panet(当时AB版darknet提供的)、PRN(作用不大)等网络结构。
当前最强的网络是dense-v3-tiny-spp,也就是BBuf修改的Backbone+原汁原味的SPP组合的结构完虐了其他模型,在测试集上达到了mAP@0.5=0.932、F1=0.951的结果。
6. SPP系列
这个得好好说说,我们三人调研了好多论文、参考了好多trick,大部分都无效,其中从来不会让人失望的模块就是SPP。我们对SPP进行了深入研究,在《卷积神经网络中的各种池化操作》中提到过。
SPP是在SPPNet中提出的,SPPNet提出比较早,在RCNN之后提出的,用于解决重复卷积计算和固定输出的两个问题,具体方法如下图所示:
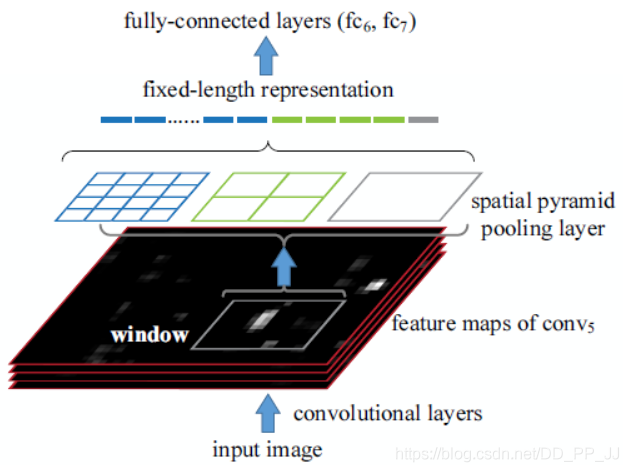
在feature map上通过selective search获得窗口,然后将这些区域输入到CNN中,然后进行分类。
实际上SPP就是多个空间池化的组合,对不同输出尺度采用不同的划窗大小和步长以确保输出尺度相同,同时能够融合金字塔提取出的多种尺度特征,能够提取更丰富的语义信息。常用于多尺度训练和目标检测中的RPN网络。
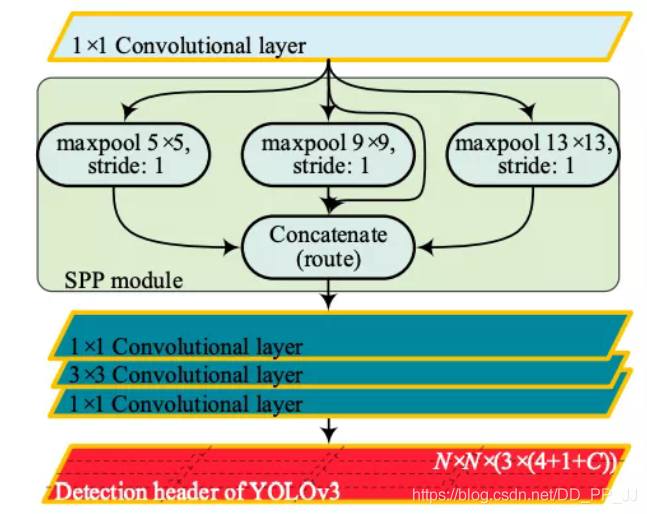
在YOLOv3中有一个网络结构叫yolov3-spp.cfg, 这个网络往往能达到比yolov3.cfg本身更高的准确率,具体cfg如下:
### SPP ###[maxpool]stride=1size=5[route]layers=-2[maxpool]stride=1size=9[route]layers=-4[maxpool]stride=1size=13[route]layers=-1,-3,-5,-6### End SPP ###这里的SPP相当于是原来的SPPNet的变体,通过使用多个kernel size的maxpool,最终将所有feature map进行concate,得到新的特征组合。
再来看一下官方提供的yolov3和yolov3-spp在COCO数据集上的对比:
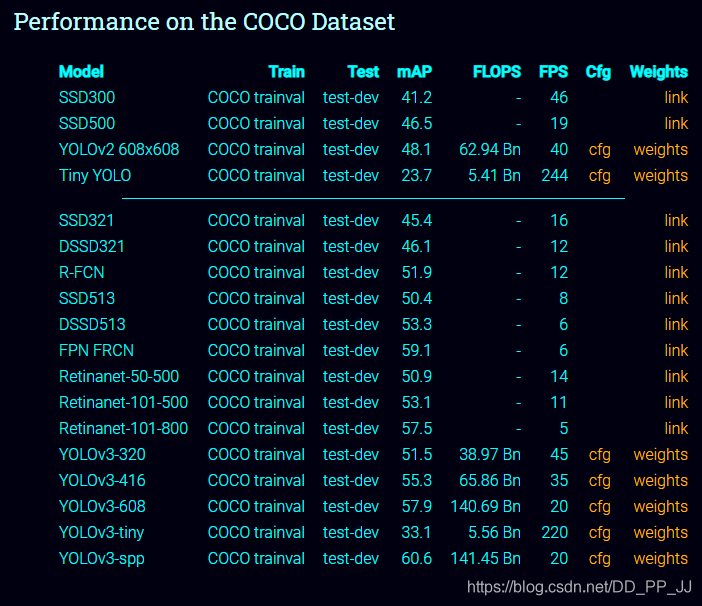
可以看到,在几乎不增加FLOPS的情况下,YOLOv3-SPP要比YOLOv3-608mAP高接近3个百分点。
分析一下SPP有效的原因:
出现检测效果提升的原因:通过spp模块实现局部特征和全局特征(所以空间金字塔池化结构的最大的池化核要尽可能的接近等于需要池化的featherMap的大小)的featherMap级别的融合,丰富最终特征图的表达能力,从而提高MAP。
Attention机制很多都是为了解决远距离依赖问题,通过使用kernel size接近特征图的size可以以比较小的计算代价解决这个问题。另外就是如果使用了SPP模块,就没有必要在SPP后继续使用其他空间注意力模块比如SK block,因为他们作用相似,可能会有一定冗余。
在本实验中,确实也得到了一个很重要的结论,那就是:
SPP是有效的,其中size的设置应该接近这一层的feature map的大小
口说无凭,看一下实验结果:
SPP系列实验
| Epoch | Model | P | R | mAP | F1 | dataset |
|---|---|---|---|---|---|---|
| baseline | dt-6a-spp | 0.99 | 0.983 | 0.984 | 0.987 | valid |
| baseline | dt-6a-spp | 0.955 | 0.948 | 0.929 | 0.951 | test |
| 直连+5x5 | dt-6a-spp-5 | 0.978 | 0.983 | 0.981 | 0.98 | valid |
| 直连+5x5 | dt-6a-spp-5 | 0.933 | 0.93 | 0.914 | 0.932 | test |
| 直连+9x9 | dt-6a-spp-9 | 0.99 | 0.983 | 0.982 | 0.987 | valid |
| 直连+9x9 | dt-6a-spp-9 | 0.939 | 0.923 | 0.904 | 0.931 | test |
| 直连+13x13 | dt-6a-spp-13 | 0.995 | 0.983 | 0.983 | 0.989 | valid |
| 直连+13x13 | dt-6a-spp-13 | 0.959 | 0.941 | 0.93 | 0.95 | test |
| 直连+5x5+9x9 | dt-6a-spp-5-9 | 0.988 | 0.988 | 0.981 | 0.988 | valid |
| 直连+5x5+9x9 | dt-6a-spp-5-9 | 0.937 | 0.936 | 0.91 | 0.936 | test |
| 直连+5x5+13x13 | dt-6a-spp-5-13 | 0.993 | 0.988 | 0.985 | 0.99 | valid |
| 直连+5x5+13x13 | dt-6a-spp-5-13 | 0.936 | 0.939 | 0.91 | 0.938 | test |
| 直连+9x9+13x13 | dt-6a-spp-9-13 | 0.981 | 0.985 | 0.983 | 0.983 | valid |
| 直连+9x9+13x13 | dt-6a-spp-9-13 | 0.925 | 0.934 | 0.907 | 0.93 | test |
当前的feature map大小就是13x13,实验结果表示,直接使用13x13的效果和SPP的几乎一样,运算量还减少了。
loss方面尝试了focal loss,但是经过调整alpha和beta两个参数,不管用默认的还是自己慢慢调参,网络都无法收敛,所以当时给作者提了一个issue: https://github.com/ultralytics/yolov3/issues/811
glenn-jocher说效果不好就别用:(
BBuf也研究了好长时间,发现focal loss在Darknet中可以用,但是效果也一般般。最终focal loss也是无疾而终。此外还试着调整了ignore thresh,来配合focal loss,实验结果如下(在AB版Darknet下完成实验):
| state | model | P | R | mAP | F1 | data |
|---|---|---|---|---|---|---|
| ignore=0.7 | dt-6a-spp-fl | 0.97 | 0.97 | 0.9755 | 0.97 | valid |
| ignore=0.7 | dt-6a-spp-fl | 0.96 | 0.93 | 0.9294 | 0.94 | test |
| ignore=0.3 | dt-6a-spp-fl | 0.95 | 0.99 | 0.9874 | 0.97 | valid |
| ignore=0.3 | dt-6a-spp-fl | 0.89 | 0.92 | 0.9103 | 0.90 | test |
在这个实验过程中,和BBuf讨论有了很多启发,也进行了总结,在这里公开出来,(可能部分结论不够严谨,没有经过严格对比实验,感兴趣的话可以做一下对比实验)。
以上是整个实验过程的一部分,后边阶段我们还遇到了很多困难,想将项目往轻量化的方向进行,由于种种原因,最终没有继续下去,在这个过程中,总结一下教训,实验说明和备份要做好,修改的数据集、训练得到的权重、当时的改动点要做好备份。现在回看之前的实验记录和cfg文件都有点想不起来某些模型的改动点在哪里了,还是整理的不够详细,实验记录太乱。
关于如何改进YOLOv3进行红外小目标检测就分享到这里了,希望以上内容可以对大家有一定的帮助,可以学到更多知识。如果觉得文章不错,可以把它分享出去让更多的人看到。
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。
原文链接:https://my.oschina.net/u/4580321/blog/4556069



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



