arduinoзј–з ҒеҷЁжҺҘеҸЈжЁЎејҸжҳҜд»Җд№Ҳ
жң¬зҜҮеҶ…е®№д»Ӣз»ҚдәҶвҖңarduinoзј–з ҒеҷЁжҺҘеҸЈжЁЎејҸжҳҜд»Җд№ҲвҖқзҡ„жңүе…ізҹҘиҜҶпјҢеңЁе®һйҷ…жЎҲдҫӢзҡ„ж“ҚдҪңиҝҮзЁӢдёӯпјҢдёҚе°‘дәәйғҪдјҡйҒҮеҲ°иҝҷж ·зҡ„еӣ°еўғпјҢжҺҘдёӢжқҘе°ұи®©е°Ҹзј–еёҰйўҶеӨ§е®¶еӯҰд№ дёҖдёӢеҰӮдҪ•еӨ„зҗҶиҝҷдәӣжғ…еҶөеҗ§пјҒеёҢжңӣеӨ§е®¶д»”з»Ҷйҳ…иҜ»пјҢиғҪеӨҹеӯҰжңүжүҖжҲҗпјҒ
зј–з ҒеҷЁеҲҶзұ»пјҡ
жҢүе·ҘдҪңеҺҹзҗҶпјҡе…үз”өејҸгҖҒзЈҒз”өејҸе’Ңи§ҰзӮ№з”өеҲ·ејҸпјӣ
жҢүз Ғзӣҳзҡ„еҲ»еӯ”ж–№ејҸпјҡеўһйҮҸејҸе’Ңз»қеҜ№ејҸдёӨзұ»пјӣ
иҝҷжҳҜд»ҺзҪ‘дёҠзңӢеҲ°дёҖдёӘз®Җд»ӢпјҢеҸӘжҺҘи§ҰиҝҮArduinoзҡ„зј–з ҒеҷЁпјҢе…¶д»–жҡӮжңӘдҪҝз”ЁиҝҮгҖӮ
Arduinoзҡ„зј–з ҒеҷЁеұһдәҺеўһйҮҸејҸгҖӮе®ғдёҖе…ұжңү5ж №зәҝгҖӮ
еҲҶеҲ«дёәвҖңCLKвҖқгҖҒвҖңDTвҖқгҖҒвҖңSWвҖқгҖҒвҖң+вҖқгҖҒвҖңGNDвҖқгҖӮ
вҖң+вҖқгҖҒвҖңGNDвҖқпјҡ
еӢҝз”ЁеӨҡиҜҙпјҢVCCдёҺGNDпјҢжҺҘиҮіжқҝеӯҗзҡ„VCCдёҺGNDеҚіеҸҜгҖӮ
вҖңSWвҖқпјҡ
Arduinoд»Ӣз»ҚиҜҙпјҢеҪ“ж—Ӣй’®ж—ӢиҪ¬е®ҢдёҖеңҲж—¶пјҢиҜҘи„ҡдјҡж”ҫеҮәдёҖдёӘз”өе№іи·іеҸҳдҝЎеҸ·пјҢзӣёеҪ“дәҺж—ӢиҪ¬зј–з ҒеҷЁеёёиҜҙзҡ„вҖңZвҖқдҝЎеҸ·пјҢе®һйҷ…дёҠжҲ‘д№°зҡ„иҝҷдёӘеҸӘжҳҜдёҖдёӘејҖе…іпјҢеҚіж—Ӣй’®йғЁеҲҶеҸҜд»ҘжҢүдёӢеҺ»пјҲзұ»дјјдәҺжұҪиҪҰдёҠзҡ„йҹійҮҸи°ғиҠӮжҢүй’®пјүпјҢиҜҘжҺҘеҸЈдјҡдә§з”ҹдёҖдёӘдёӢйҷҚжІҝгҖӮ然еҗҺз”ұMCUеҺ»еҒҡзӣёе…іеӨ„зҗҶгҖӮ
вҖңCLKвҖқгҖҒвҖңDTвҖқпјҡ
еңЁиҜҘжЁЎеқ—дёҠжҳҫзӨәзҡ„дёқеҚ°еҗҚз§°дёәиҝҷдёӨдёӘпјҢдёҚжҳҺзҷҪдёәд»Җд№ҲжҳҜиҝҷдёӘдёқеҚ°пјҢеә”иҜҘе®һйҷ…еҜ№еә”дәҺзј–з ҒеҷЁеёёз”Ёзҡ„вҖңAвҖқгҖҒвҖңBвҖқдҝЎеҸ·еҗ§пјҢиҝҷдёӨдёӘдҝЎеҸ·зҡ„еҸ‘з”ҹж–№ејҸеҰӮдёӢпјҡ
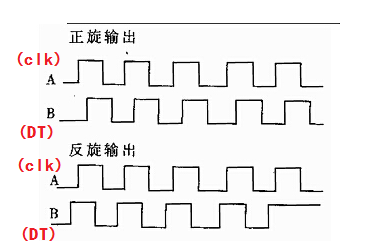
еҰӮдёҠеӣҫеҪ“ж—Ӣй’®ејҖе§ӢжӯЈеҗ‘ж—ӢиҪ¬ж—¶пјҢвҖңAвҖқд»ҺдҪҺз”өе№іеҸҳдёәй«ҳз”өе№іпјҢвҖңBвҖқдҝқжҢҒдёҚеҸҳпјӣеҪ“ж—Ӣй’®ж—ӢиҪ¬еҲ°йў„е®ҡдҪҚзҪ®ж—¶пјҢвҖңAвҖқз»ҙжҢҒдёәй«ҳз”өе№іпјҢвҖңBвҖқ然еҗҺи·ҹзқҖд»ҺдҪҺз”өе№іи·іеҸҳеҲ°й«ҳз”өе№ігҖӮд№ҹе°ұжҳҜиҜҙпјҢжӯЈж—Ӣж—¶пјҢвҖңAвҖқжҖ»жҳҜе…ҲдёҺвҖңBвҖқејҖе§Ӣз”өе№іеҸҳеҢ–гҖӮ
еҸҚж—ӢпјҡдёҺжӯЈж—ӢзӣёеҸҚпјҢвҖңBвҖқжҖ»жҳҜе…ҲдёҺвҖңAвҖқејҖе§Ӣз”өе№іеҸҳеҢ–гҖӮ
жүҖд»ҘеңЁжӯӨеӨ„пјҢдёқеҚ°е°ҶиҜҘдёӨдёӘжҺҘзәҝеҚ°жҲҗвҖңCLKвҖқгҖҒвҖңDTвҖқе°ұи®©жҲ‘жңүзӮ№еӣ°жғ‘гҖӮд№ҹжңӘжүҫеҲ°зӣёе…іиө„ж–ҷпјҢе…ҲжҡӮж—¶ж”ҫж”ҫпјҢдёӢж¬Ўжңүе®һйҷ…еә”з”ЁпјҢе°ұзҹҘйҒ“дёәд»Җд№ҲдәҶгҖӮ
ж №жҚ®еҰӮдёҠжӯЈж—ӢеҸҚж—Ӣ规еҫӢпјҢе°ұе·Із»ҸеҸҜд»Ҙж №жҚ®зј–з ҒеҷЁиҫ“еҮәзҡ„дҝЎжҒҜеҲӨж–ӯеҮәзј–з ҒеҷЁзҡ„ж—ӢиҪ¬ж–№еҗ‘д»ҘеҸҠи®Ўз®—еҮәе…¶ж—ӢиҪ¬и§’еәҰдәҶпјҢе…·дҪ“еҒҡжі•еҰӮдёӢпјҡ
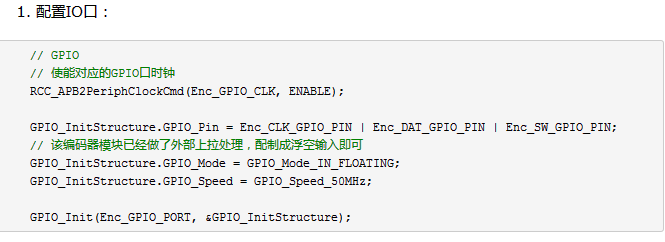
е°ҶвҖңCLkвҖқгҖҒвҖңDTвҖқеҲҶеҲ«иҝһжҺҘиҮіMCUзҡ„д»»ж„Ҹе…·жңүеӨ–йғЁдёӯж–ӯзҡ„IOеҸЈпјҢеӨ„зҗҶж–№ејҸдёәпјҡ
е°ҶиҜҘдёӨдёӘIOеҸЈй…ҚзҪ®дёәеҸҢиҫ№жІҝеӨ–йғЁдёӯж–ӯгҖӮ
еҪ“е…¶дёӯжҹҗдёӘIOеҸЈжЈҖжөӢеҲ°дёҠеҚҮжІҝжҲ–иҖ…дёӢйҷҚжІҝж—¶пјҢеңЁдёӯж–ӯеҮҪж•°еҶ…жЈҖжөӢеҸҰдёҖдёӘIOеҸЈзҡ„з”өе№ізҠ¶жҖҒгҖӮд»ҘжӯЈж—ӢдёәдҫӢпјҢжӯЈж—Ӣж—¶пјҢвҖңAвҖқе…ҲдёҠеҚҮжІҝеј•иө·дёӯж–ӯпјҢеҫ—еҲ°зҡ„вҖңAвҖқгҖҒвҖңBвҖқзҡ„з”өе№ізҠ¶жҖҒдёәвҖң10вҖқпјҢзҙ§жҺҘзқҖпјҢвҖңBвҖқдёҠеҚҮжІҝпјҢжЈҖжөӢеҲ°вҖңAвҖқгҖҒвҖңBвҖқз”өе№ізҠ¶жҖҒдёәвҖң11вҖқгҖӮ
иӢҘдёҖзӣҙжӯЈиҪ¬пјҢеҲҷвҖңAвҖқгҖҒвҖңBвҖқзҡ„з”өе№ізҠ¶жҖҒдёәвҖң10 - 11 - 01 - 00 - 10 - ...вҖқгҖӮ
иӢҘдёҖзӣҙеҸҚиҪ¬пјҢеҲҷвҖңAвҖқгҖҒвҖңBвҖқзҡ„з”өе№ізҠ¶жҖҒдёәвҖң01 - 11 - 10 - 00 - 01 - ...вҖқ
д»ҘжӯӨпјҢеҚіеҸҜеҲӨж–ӯеҮәиҜҘзј–з ҒеҷЁзҡ„ж—ӢиҪ¬ж–№еҗ‘пјҢеҗҢж—¶еңЁвҖңAвҖқгҖҒвҖңBвҖқеҗҢж—¶и·іеҸҳе®ҢжҲҗеҗҺпјҢеҚіеҸҜж №жҚ®зј–з ҒеҷЁзҡ„ж—ӢиҪ¬ж–№еҗ‘еҜ№зј–з ҒеҷЁзҡ„ж—ӢиҪ¬и®Ўж•°иҝӣиЎҢеўһеҮҸгҖӮ
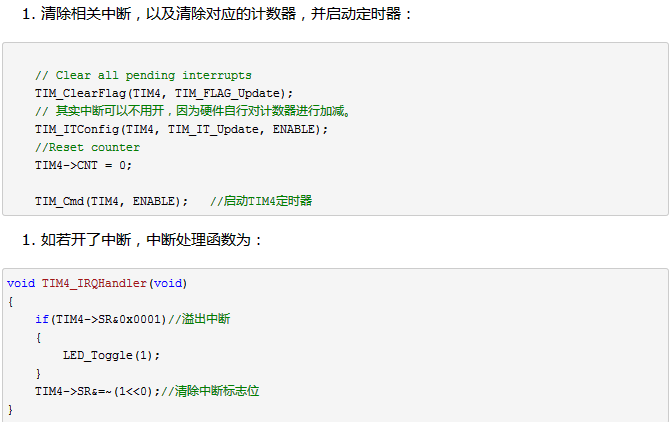
д»ҘдёҠдёәдҪҝз”ЁеӨ–йғЁдёӯж–ӯж–№ејҸеӨ„зҗҶж—ӢиҪ¬зј–з ҒеҷЁзҡ„иҫ“еҮәдҝЎжҒҜпјҢеҪ“然пјҢжң¬зҜҮиҰҒз”ЁеҲ°STM32е®ҡж—¶еҷЁзҡ„жҺҘеҸЈжЁЎејҸпјҢжүҖд»Ҙд№ҹе°ұдёҚдјҡз”Ёд»ҘдёҠзҡ„ж–№жі•иҝӣиЎҢеҲӨж–ӯгҖӮйӮЈд№Ҳе®ҡж—¶еҷЁзҡ„жҺҘеҸЈжЁЎејҸжҳҜеҰӮдҪ•еҜ№ж—ӢиҪ¬зј–з ҒеҷЁиҝӣиЎҢи®Ўж•°зҡ„е‘ўпјҹ
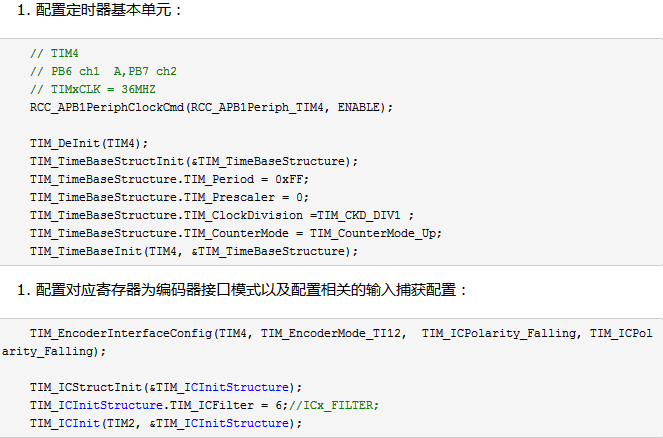
е…¶е®һеҺҹзҗҶдёҖж ·пјҢе°Ҷж—ӢиҪ¬зј–з ҒеҷЁзҡ„вҖңCLK(A)вҖқгҖҒвҖңDT(B)вҖқи„ҡжҺҘе…ҘеҲ°TIMxзҡ„йҖҡйҒ“пјҢе°ҶеҜ№еә”йҖҡйҒ“еј•и„ҡй…ҚзҪ®дёәзј–з ҒеҷЁжҺҘеҸЈжЁЎејҸпјҢдҪҝиғҪи®Ўж•°пјҢ然еҗҺSTM32зҡ„еҖје°ұдјҡеңЁзЎ¬д»¶дёҠжҢүз…§дёҠиҝ°и§„еҜ№и®Ўж•°еҷЁзҡ„еҖјиҝӣиЎҢеҠ еҮҸгҖӮ
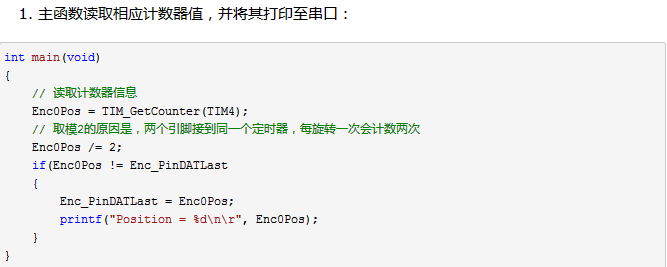
жң¬е®һйӘҢжҺҘеҲ°зҡ„жҳҜSTM32F103зҡ„вҖңPB6(TIM4_CH1)вҖқгҖҒвҖңPB7(TIM4_CH2)вҖқпјҢе…·дҪ“й…ҚзҪ®еҰӮдёӢпјҡ
вҖңarduinoзј–з ҒеҷЁжҺҘеҸЈжЁЎејҸжҳҜд»Җд№ҲвҖқзҡ„еҶ…е®№е°ұд»Ӣз»ҚеҲ°иҝҷйҮҢдәҶпјҢж„ҹи°ўеӨ§е®¶зҡ„йҳ…иҜ»гҖӮеҰӮжһңжғідәҶи§ЈжӣҙеӨҡиЎҢдёҡзӣёе…ізҡ„зҹҘиҜҶеҸҜд»Ҙе…іжіЁдәҝйҖҹдә‘зҪ‘з«ҷпјҢе°Ҹзј–е°ҶдёәеӨ§е®¶иҫ“еҮәжӣҙеӨҡй«ҳиҙЁйҮҸзҡ„е®һз”Ёж–Үз« пјҒ