本篇文章给大家分享的是有关micropython中如何用单片机制作鞋码匹配仪,小编觉得挺实用的,因此分享给大家学习,希望大家阅读完这篇文章后可以有所收获,话不多说,跟着小编一起来看看吧。
自己测了下稍微有些偏差,显示鞋码比我实际鞋码大了一号,各位大大有没有意见我改正下。下面是具体的制作过程和代码。
1.原理
鞋码匹配仪,利用超声波测距的原理。通过使用超声波遇到障碍返回的特性,计算超声波放出与返回的时间计算来测定障碍与超声波模块的距离。
鞋码匹配仪的固有大小已知,在脚放入时,大小会发生改变 使用已知距离对改变后的距离做差获得脚的尺寸,再通过尺寸与距离的转换得到正确的鞋码(此处使用标准鞋码)。
2. 所需元器件(某宝能买到 挺便宜的)
· 超声波模块 1个
· TPYBoard v102板子 1块
· 四位数码管 1个
· micro USB数据线 1条
· 杜邦线 若干
3. 超声波模块工作原理
(1)采用IO口TRIG触发测距,给最少10us的高电平信号。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回。
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。
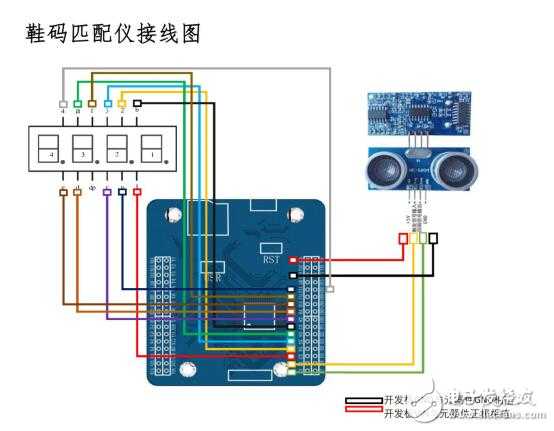
如下图接线,VCC 供 5V电源, GND 为地线,TRIG 触发控制信号输入,ECHO 回响信号输出等四个接口端。

4. 控制四位数码管显示数字
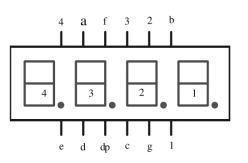

(1)1、2、3、4是“位选”针脚,用于控制具体哪一位显示。
(2)a、b、c、d、e、f、g、dp(h)是“段选”针脚,用法和1位数码管一致,用来显示具体的数值。
数码管(位选) | TPYBoard v10x开发板 |
1 | X3 |
2 | X4 |
3 | X5 |
4 | GND(鞋码匹配用不到四位所以该脚拉低) |
数码管(段选) | TPYBoard v10x开发板 |
a | X6 |
b | X7 |
c | X8 |
d | Y9 |
e | Y10 |
f | Y11 |
g | Y12 |
dp(h) | 留空(此脚为小数点的控制脚悬空即可) |
5. 接线图
6. 源代码
import pyb
from pyb import Pin
from pyb import Timer
from machine import SPI,Pin
Trig = Pin('X2',Pin.OUT_PP)
Echo = Pin('X1',Pin.IN)
num=0
flag=0
run=1
def start(t):
global flag
global num
if(flag==0):
num=0
else:
num=num+1
def stop(t):
global run
if(run==0):
run=1
start1=Timer(1,freq=10000,callback=start)
stop1=Timer(4,freq=2,callback=stop)
sizecc = [35,36,37,38,39,40,41,42,43,44,45,46,47]#280-47 -5
while True:
if(run==1):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
while(Echo.value()==0):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
flag=0
if(Echo.value()==1):
flag=1
while(Echo.value()==1):
flag=1
if(num!=0):
#print('num:',num)
distance=num/1000*34000/2
print('Distance')
print(distance,'mm')
cc = (int)((distance-215)/5)
if cc<0:
cc=0
elif cc>12:
cc=12
print(sizecc[cc],'cc')
flag=0
run=0
以上就是micropython中如何用单片机制作鞋码匹配仪,小编相信有部分知识点可能是我们日常工作会见到或用到的。希望你能通过这篇文章学到更多知识。更多详情敬请关注亿速云行业资讯频道。
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。
原文链接:https://my.oschina.net/micropython/blog/1601511



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



