这篇文章主要介绍C++ OpenCV特征提取之如何实现Harris角点检测,文中介绍的非常详细,具有一定的参考价值,感兴趣的小伙伴们一定要看完!
简介
算法基本思想是使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点。
关于角点的应用在图像处理上比较广泛,如图像匹配(FPM特征点匹配)、相机标定等。网上也有很多博客对Harris角点检测原理进行描述,但基本上只是描述了算法流程,而其中相关细节并未作出解释,我们简单补充说明一下
角点
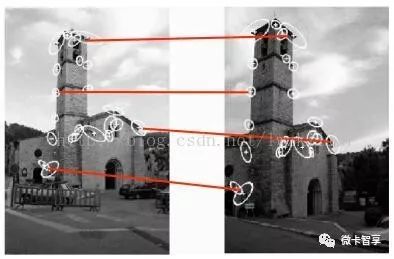
下面有两幅不同视角的图像,通过找出对应的角点进行匹配。
再看下图所示,放大图像的两处角点区域:
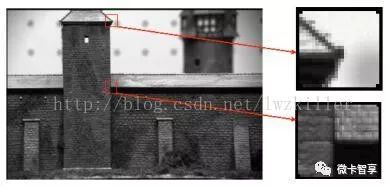
我们可以直观的概括下角点所具有的特征:
>轮廓之间的交点;
>对于同一场景,即使视角发生变化,通常具备稳定性质的特征;
>该点附近区域的像素点无论在梯度方向上还是其梯度幅值上有着较大变化;
算法基本思想是使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点
先上效果视频
相关API
cornerHarris(InputArray src, OutputArray dst, int blockSize, int apertureSize, double k, int borderType=BORDER_DEFAULT )
参数:
src – 输入单通道8位或浮点图像.
dst – 图像存储Harris检测器响应。它具有CVY32 FC1类型,大小与SRC相同
blockSize – 邻域大小
apertureSize – 索贝尔算子参数值
k – Harris检测器的阈值
boderType – 参数
实现步骤
将图像转为灰度图(cvtcolor)
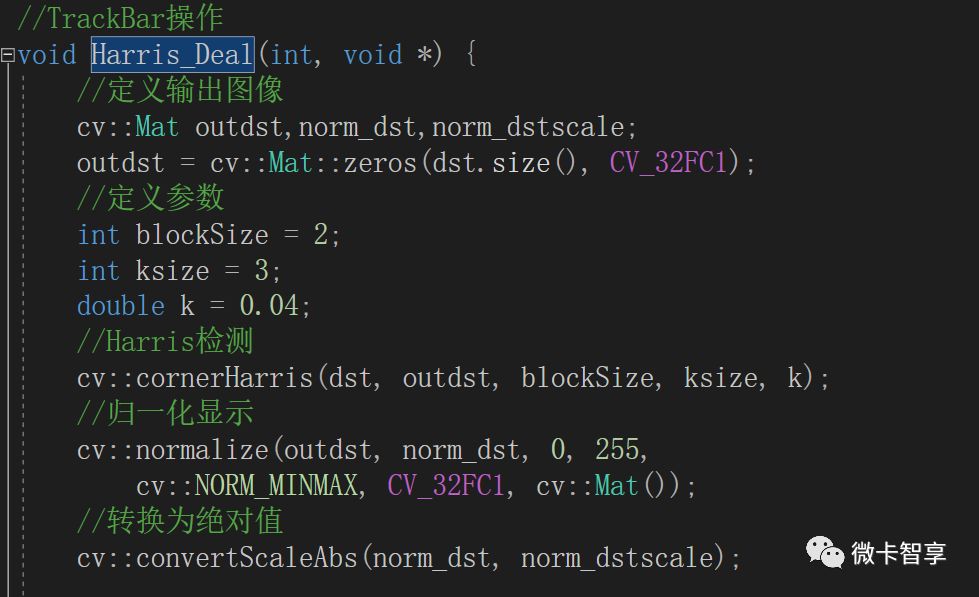
创建一个CV_32FC1的同样大小图像(Mat::zeros(size,CV_32FC1))
进行Harris角点检测(cornerHarris)
归一化(normalize)
转化为绝对值(convertScaleAbs)
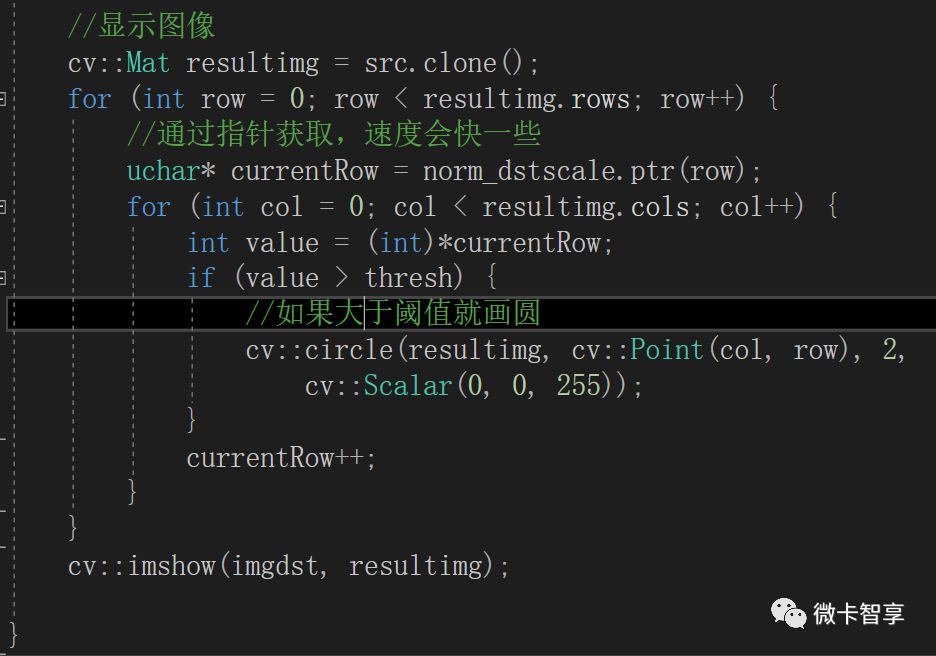
把获取到的的大于阈值的的角点画红色的圆显示出来
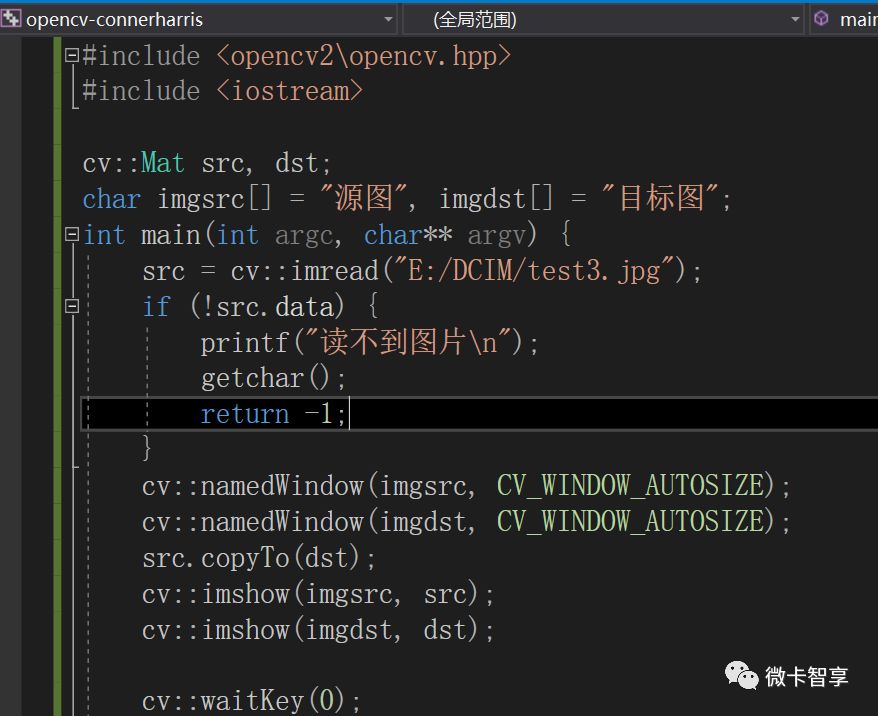
代码演示
我们新建一个项目opencv--connerharris,简单说一下,以后我们就不再说了,我们把Opencv3.4.1重新用Cmake编译了一遍,因为做特片简单需要加入Opencv-contrib的库,所以我们重新编译在newbuild里了,同时编译环境也重新配了一个,配置里面多少一些DLL和LIB别的还是按照配置属性(VS2017配置OpenCV通用属性),然后在源文件写入#include和main方法
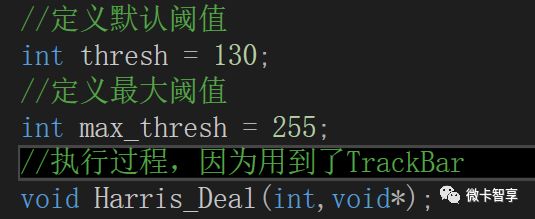
在上面定义一个默认阈值和一个过程方法,因为我们用到了Trackbar
然输出图像上创建Trackbar
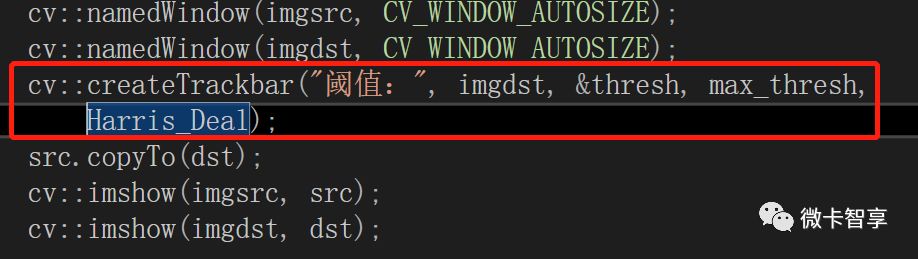
在过程前先转为灰度图
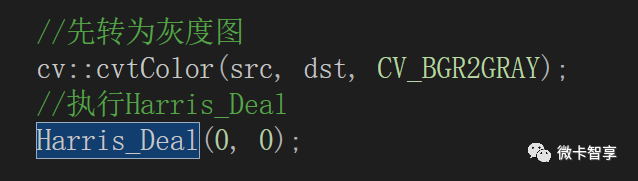
接下来就是重点,我们的Harris_Deal的方法
显示效果

以上是“C++ OpenCV特征提取之如何实现Harris角点检测”这篇文章的所有内容,感谢各位的阅读!希望分享的内容对大家有帮助,更多相关知识,欢迎关注亿速云行业资讯频道!
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。
原文链接:https://my.oschina.net/u/4582134/blog/4582410



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



