这篇文章主要介绍“matlab如何实现PID控制小车前进到指定位置”,在日常操作中,相信很多人在matlab如何实现PID控制小车前进到指定位置问题上存在疑惑,小编查阅了各式资料,整理出简单好用的操作方法,希望对大家解答”matlab如何实现PID控制小车前进到指定位置”的疑惑有所帮助!接下来,请跟着小编一起来学习吧!
分为三步:
根据目标位置确定小车前进方向
计算目标方向与当前方向的差异
选取适当PID参数驱动左右轮运转
首先打开这个文件
在
实现PID控制小车前进到指定位置
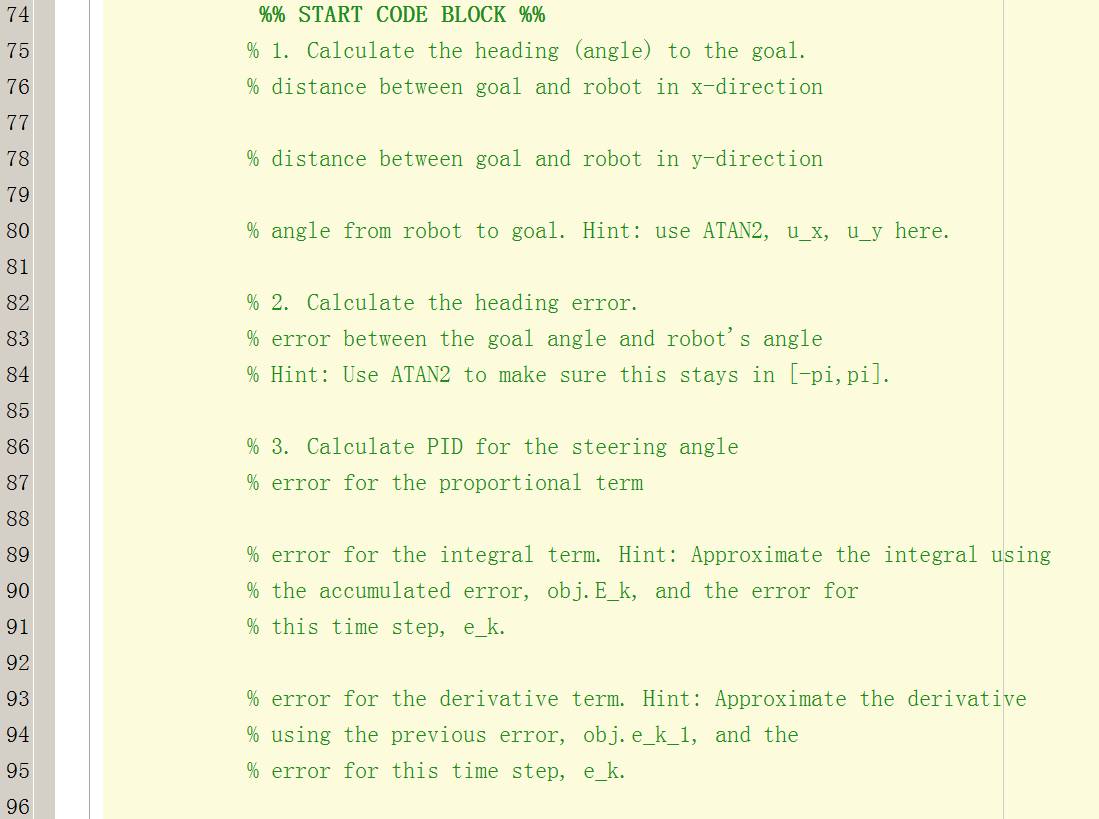
%% START CODE BLOCK %%
% 1. Calculate the heading (angle) to the goal.
% distance between goal and robot in x-direction
u_x = x_g-x;
% distance between goal and robot in y-direction
u_y = y_g-y;
% angle from robot to goal. Hint: use ATAN2, u_x, u_y here.
theta_g = atan2(u_y,u_x);
% 2. Calculate the heading error.
% error between the goal angle and robot's angle
% Hint: Use ATAN2 to make sure this stays in [-pi,pi].
e_k = atan2(sin(theta_g-theta),cos(theta_g-theta));
% 3. Calculate PID for the steering angle
% error for the proportional term
e_P = e_k;
% error for the integral term. Hint: Approximate the integral using
% the accumulated error, obj.E_k, and the error for
% this time step, e_k.
e_I = obj.E_k + e_k*dt;
% error for the derivative term. Hint: Approximate the derivative
% using the previous error, obj.e_k_1, and the
% error for this time step, e_k.
e_D = (e_k-obj.e_k_1)/dt;
%% END CODE BLOCK %%
最后运行
到此,关于“matlab如何实现PID控制小车前进到指定位置”的学习就结束了,希望能够解决大家的疑惑。理论与实践的搭配能更好的帮助大家学习,快去试试吧!若想继续学习更多相关知识,请继续关注亿速云网站,小编会继续努力为大家带来更多实用的文章!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





