本篇文章给大家分享的是有关OpenCV中怎么实现可分离滤波,小编觉得挺实用的,因此分享给大家学习,希望大家阅读完这篇文章后可以有所收获,话不多说,跟着小编一起来看看吧。
无论是图像卷积还是滤波,在原图像上移动滤波器的过程中每一次的计算结果都不会影响到后面过程的计算结果,因此图像滤波是一个并行的算法,在可以提供并行计算的处理器中可以极大的加快图像滤波的处理速度。
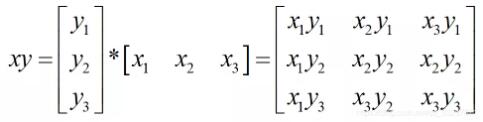
先对X(Y)方向滤波,再对Y(X)方向滤波的结果与将两个方向的滤波器联合后整体滤波的结果相同。两个方向的滤波器的联合就是将两个方向的滤波器相乘,得到一个矩形的滤波器
void filter2D( InputArray src, OutputArray dst, int ddepth,
InputArray kernel, Point anchor = Point(-1,-1),
double delta = 0, int borderType = BORDER_DEFAULT );src:待滤波图像
dst:输出图像,与输入图像src具有相同的尺寸、通道数和数据类型。
ddepth:输出图像的数据类型(深度),根据输入图像的数据类型不同拥有不同的取值范围,具体的取值范围在表5-1给出,当赋值为-1时,输出图像的数据类型自动选择。
kernel:滤波器。
anchor:内核的基准点(锚点),其默认值为(-1,-1)代表内核基准点位于kernel的中心位置。基准点即卷积核中与进行处理的像素点重合的点,其位置必须在卷积核的内部。
delta:偏值,在计算结果中加上偏值。
borderType:像素外推法选择标志,取值范围在表3-5中给出。默认参数为BORDER_DEFAULT,表示不包含边界值倒序填充。
void sepFilter2D( InputArray src, OutputArray dst, int ddepth,
InputArray kernelX, InputArray kernelY,
Point anchor = Point(-1,-1),
double delta = 0, int borderType = BORDER_DEFAULT );src:待滤波图像
dst:输出图像,与输入图像src具有相同的尺寸、通道数和数据类型。
ddepth:输出图像的数据类型(深度),根据输入图像的数据类型不同拥有不同的取值范围,具体的取值范围在表5-1给出,当赋值为-1时,输出图像的数据类型自动选择。
kernelX:X方向的滤波器,
kernelY:Y方向的滤波器。
anchor:内核的基准点(锚点),其默认值为(-1,-1)代表内核基准点位于kernel的中心位置。基准点即卷积核中与进行处理的像素点重合的点,其位置必须在卷积核的内部。
delta:偏值,在计算结果中加上偏值。
borderType:像素外推法选择标志,取值范围在表3-5中给出。默认参数为BORDER_DEFAULT,表示不包含边界值倒序填充。
//
// Created by smallflyfly on 2021/6/15.
//
#include "opencv2/highgui.hpp"
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace std;
using namespace cv;
int main() {
float points[] = {
1, 2, 3, 4, 5,
6, 7, 8, 9, 10,
11, 12, 13, 14, 15,
16, 17, 18, 19, 20,
21, 22, 23, 24, 25
};
Mat data(5, 5, CV_32FC1, points);
// 验证高斯滤波器可分离
Mat gaussX = getGaussianKernel(3, 1);
cout << gaussX << endl;
Mat gaussDstData, gaussDataXY;
GaussianBlur(data, gaussDstData, Size(3, 3), 1, 1, BORDER_CONSTANT);
sepFilter2D(data, gaussDataXY, -1, gaussX, gaussX, Point(-1, -1), 0, BORDER_CONSTANT);
cout << gaussDstData << endl;
cout << gaussDataXY << endl;
cout << "######################################" << endl;
// Y方向上滤波
Mat a = (Mat_<float>(3, 1) << -1, 3, -1);
// X方向上滤波
Mat b = a.reshape(1, 1);
// XY联合滤波
Mat ab = a * b;
Mat dataX, dataY, dataXY1, dataXY2, dataSepXY;
filter2D(data, dataX, -1, b);
filter2D(dataX, dataXY1, -1, a);
filter2D(data, dataXY2, -1, ab);
sepFilter2D(data, dataSepXY, -1, a, b);
// 验证结果
cout << dataXY1 << endl;
cout << dataXY2 << endl;
cout << dataSepXY << endl;
Mat im = imread("test.jpg");
resize(im, im, Size(0, 0), 0.5, 0.5);
Mat imX, imY, imXY, imSepXY;
filter2D(im, imX, -1, b);
filter2D(imX, imXY, -1, a);
sepFilter2D(im, imSepXY, -1, a, b);
imshow("imXY", imXY);
imshow("imSepXY", imSepXY);
waitKey(0);
destroyAllWindows();
return 0;
}以上就是OpenCV中怎么实现可分离滤波,小编相信有部分知识点可能是我们日常工作会见到或用到的。希望你能通过这篇文章学到更多知识。更多详情敬请关注亿速云行业资讯频道。
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



