这篇文章主要介绍OpenCV如何实现低对比度图像脏污区域检测,文中介绍的非常详细,具有一定的参考价值,感兴趣的小伙伴们一定要看完!
先上图:


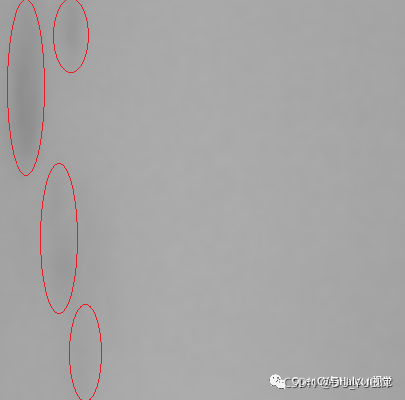
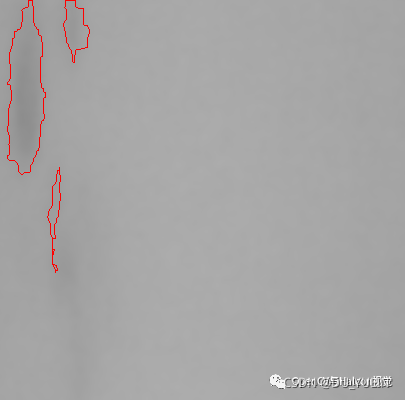
第一张图如果不是标注结果,我都没有发现脏污区域在哪里,第二张图还清晰一些,基本可以看出来图像靠近左边缘的位置有偏暗的区域,这就是我们所说的脏污区域了,也是我们要检测的区域。
标注结果图:

这里介绍两种实现方法,
第一种是用C++实现参考博文的方法,即利用梯度方法来检测,具体步骤如下:
对图像进行高斯模糊去噪,梯度计算对噪声很敏感;
调用Sobel函数计算图像在x,y方向梯度;
调用convertScaleAbs函数将x,y梯度图像像素值限制在0-255;
调用addWeight函数将x,y梯度图像融合;
调用threshold函数对融合图像进行二值化;
使用先腐蚀、后膨胀的形态学处理方法对二值图像进行非脏污区域过滤;
调用findContours方法查找脏污区域轮廓。
第二种方法是本人根据提高图像对比度思路实现的,具体步骤如下:
8. 对图像进行高斯模糊去噪;
9. 使用局部直方图均衡化方法来提高图像对比度;
10. 使用OTSU二值化阈值方法来粗略分割脏污区域;
11. 对二值图像使用腐蚀的形态学操作过滤掉部分非脏污区域;
12. 调用findContours方法查找脏污区域轮廓。
#include <iostream>
#include <opencv2\imgcodecs.hpp>
#include <opencv2\core.hpp>
#include <opencv2\imgproc.hpp>
#include <opencv2\highgui.hpp>
#include <vector>
int main()
{
using namespace cv;
std::string strImgFile = "C:\\Temp\\common\\Workspace\\Opencv\\images\\led1.jpg";
Mat mSrc = imread(strImgFile);
CV_Assert(mSrc.empty() == false);
Mat mSrc2 = mSrc.clone();
CV_Assert(mSrc2.empty() == false);
Mat mGray;
cvtColor(mSrc, mGray, COLOR_BGR2GRAY);
GaussianBlur(mGray, mGray, Size(5, 5), 1.0);
Mat mGray2 = mGray.clone();
CV_Assert(mGray.empty() == false);
imshow("gray", mGray.clone());
//方法1:利用梯度变化检测缺陷
Mat mSobelX, mSobelY;
Sobel(mGray, mSobelX, CV_16S, 1, 0, 7);
Sobel(mGray, mSobelY, CV_16S, 0, 1, 7);
convertScaleAbs(mSobelX, mSobelX);
convertScaleAbs(mSobelY, mSobelY);
Mat mEdge;
addWeighted(mSobelX, 1, mSobelY, 1, 0, mEdge);
imshow("edge", mEdge);
Mat mThresh;
threshold(mEdge, mThresh, 0, 255, THRESH_BINARY | THRESH_OTSU);
imshow("thresh", mThresh);
Mat kernel1 = getStructuringElement(MORPH_RECT, Size(11, 11));
CV_Assert(kernel1.empty() == false);
Mat mMorph;
morphologyEx(mThresh, mMorph, MORPH_ERODE, kernel1);
imshow("erode", mMorph);
Mat kernel2 = getStructuringElement(MORPH_RECT, Size(5, 5));
morphologyEx(mMorph, mMorph, MORPH_DILATE, kernel2);
imshow("dilate", mMorph);
std::vector<std::vector<Point>> contours;
findContours(mMorph, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
for (int i = 0; i < contours.size(); i++)
{
float area = contourArea(contours[i]);
if (area > 200)
{
drawContours(mSrc, contours, i, Scalar(0, 0, 255));
}
}
imshow("result1", mSrc.clone());
//方法2: 利用局部直方图均衡化方法检测缺陷
Ptr<CLAHE> ptrCLAHE = createCLAHE(20, Size(30, 30));
ptrCLAHE->apply(mGray2, mGray2);
imshow("equalizeHist", mGray2);
Mat mThresh3;
threshold(mGray2, mThresh3, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
CV_Assert(mThresh3.empty() == false);
imshow("thresh", mThresh3);
Mat kernel2_1 = getStructuringElement(MORPH_RECT, Size(9, 9));
Mat mMorph3;
morphologyEx(mThresh3, mMorph3, MORPH_ERODE, kernel2_1);
CV_Assert(mMorph3.empty() == false);
imshow("morph3", mMorph3);
std::vector<std::vector<Point>> contours2;
findContours(mMorph3, contours2, RETR_EXTERNAL, CHAIN_APPROX_NONE);
for (int i = 0; i < contours2.size(); i++)
{
float area = contourArea(contours2[i]);
if (area > 200)
{
drawContours(mSrc2, contours2, i, Scalar(0, 0, 255));
}
}
imshow("result2", mSrc2);
waitKey(0);
destroyAllWindows();
system("pause");
return 0;
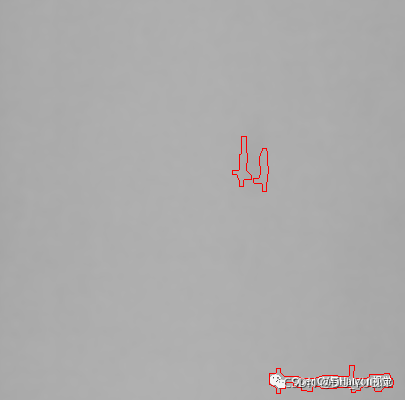
}梯度方法检测结果:
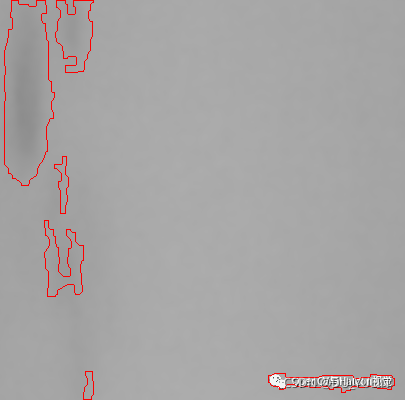
局部直方图均衡化方法检测结果:
以上是“OpenCV如何实现低对比度图像脏污区域检测”这篇文章的所有内容,感谢各位的阅读!希望分享的内容对大家有帮助,更多相关知识,欢迎关注亿速云行业资讯频道!
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



