延续分派方法,是指为一个用户程序分派一个延续的内存空间。它次要包含单连续续分派、固定分辨别配和静态分辨别配。
内存在此方法下分为零碎区和用户区,零碎区仅供给给操作零碎运用,平日在低地址局部;用户区是为用户供给的、除零碎区以外的内存空间。这种方法无需停止内存维护。
这种方法的长处是复杂、无内部碎片,可以釆用掩盖技巧,不需求额定的技巧支撑。缺陷是只能用于单用户、单义务的操作零碎中,有外部碎片,存储器的应用率极低。
固定分辨别配是最复杂的一种多道程序存储治理方法,它将用户内存空间划分为若干个固定巨细的区域,每一个分区只装入一道功课。当有闲暇分区时,即可以再从外存的后备功课队列中,选择恰当巨细的功课装入该分区,如斯轮回。
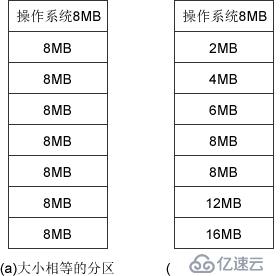
图3-4 固定分辨别配的两种办法
固定分辨别配在划分分区时,有两种分歧的办法,如图3-4所示。
分区巨细相等:用于应用一台盘算机去掌握多个相反对象的场所,缺少灵敏性。
分区巨细不等:划分为含有多个较小的分区、过量的中等分区及大批的大分区。
为便于内存分派,平日将分区按巨细列队,并为之树立一张分区阐明表,个中各表项包含每一个分区的肇端地址、巨细及形态(能否已分派),如图3-5(a)所示。当有效户程序要装入时,便检索该表,以找到适宜的分区赐与分派并将其形态置为”已分派”;未找到适宜分区则回绝为该用户程序分派内存。存储空间的分派状况如图3-5(b)所示。
这种分区方法存在两个成绩:一是程序能够太大而放不进任何一个分区中,这时用户不得不运用掩盖技巧来运用内存空间;二是主存应用率低,当程序小于固定分区巨细时,也占用了一个完好的内存分区空间,如许分区外部有空间糜费,这种景象称为外部碎片。
固定分区是可用于多道程序设计最复杂的存储分派,无内部碎片,但不克不及完成多过程共享一个主存区,所以存储空间应用率低。固定分辨别配很罕用于如今通用的操作零碎中,但在某些用于掌握多个相反对象的掌握零碎中仍发扬着必定的感化。
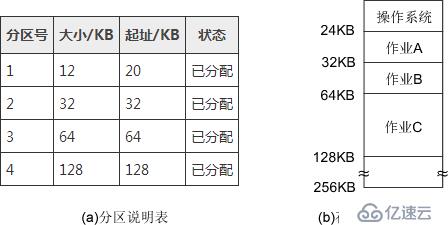
图3-5 固定分区阐明表和内存分派状况
静态分辨别配又称为可变分辨别配,是一种静态划分外存的分区办法。这种分区办法不事后将内存划分,而是在过程装入内存时,依据过程的巨细静态地树立分区,并使分区的巨细正好合适过程的需求。因而零碎平分区的巨细和数量是可变的。
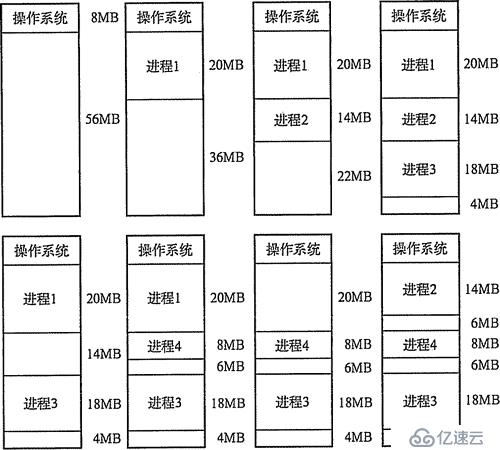
图3-6静态分区
如图3-6所示,零碎有64MB内存空间,个中低8MB固定分派给操作零碎,其他为用户可用内存。开端古装入前三个过程,在它们辨别分派到所需空间后,内存只剩下4MB,过程4无法装入。在某个时辰,内存中没有一个停当过程,CPU呈现闲暇,操作零碎就换出过程2,换入过程4。因为过程4比过程2小,如许在主存中就发生了一个6MB的内存块。之后CPU又呈现闲暇,而主存无法包容过程2,操作零碎就换出过程1,换入过程2。
静态分区在开端分派时是很好的,然则之后会招致内存中呈现很多小的内存块。跟着工夫的推移,内存中会发生越来越多的碎片(图3-6中最初的4MB和两头的6MB,且跟着过程的换入/换出,很能够会呈现更多更小的内存块),内存的应用率随之降低。这些小的内存块称为内部碎片,指在一切分区外的存储空间会酿成越来越多的碎片,这与固定分区中的外部碎片正好绝对。克制内部碎片可以经过紧凑(Compaction)技巧来处理,就是操作零碎不时地对过程停止挪动和整顿。然则这需求静态重定位存放器的支撑,且绝对费时。紧凑的进程实践上相似于Windows零碎中的磁盘整顿程序,只不外后者是对外存空间的紧凑。
在过程装入或换入主存时,假如内存中有多个足够大的闲暇块,操作零碎必需肯定分派哪个内存块给过程运用,这就是静态分区的分派战略,思索以下几种算法:
初次顺应(First Fit)算法:闲暇分区以地址递增的次第链接。分派内存时次序查找,找到巨细能知足请求的第一个闲暇分区。
最佳顺应(Best Fit)算法:闲暇分区按容量递增构成分区链,找到第一个能知足请求的闲暇分区。
最坏顺应(Worst Fit)算法:又称最大顺应(Largest Fit)算法,闲暇分区以容量递加的次第链接。找到第一个能知足请求的闲暇分区,也就是遴选出最大的分区。
临近顺应(Next Fit)算法:又称轮回初次顺应算法,由初次顺应算法演化而成。分歧之处是分派内存时从前次查找完毕的地位开端持续查找。
在这几种办法中,初次顺应算法不只是最复杂的,并且平日也是最好和最快的。在UNIX 零碎的最后版本中,就是运用初次顺应算法为过程分派内存空间,个中运用数组的数据构造 (而非链表)来完成。不外,初次顺应算法会使得内存的低地址局部呈现许多小的闲暇分区,而每次分派查找时,都要经由这些分区,因而也添加了查找的开支。
临近顺应算法试图处理这个成绩,但实践上,它经常会招致在内存的末尾分派空间(由于在一遍扫描中,内存后面局部运用后再释放时,不会介入分派),决裂成小碎片。它平日比初次顺应算法的后果要差。
最佳顺应算法固然称为“最佳”,然则功能平日很差,由于每次最佳的分派会留下很小的难以应用的内存块,它会发生最多的内部碎片。
最坏顺应算法与最佳顺应算法相反,选择最大的可用块,这看起来最不轻易发生碎片,然则却把最大的延续内存划离开,会很快招致没有可用的大的内存块,因而功能也十分差。
Kunth和Shore辨别就前三种办法对内存空间的应用状况做了模仿试验,后果标明:
初次顺应算法能够比最佳顺应法后果好,而它们两者必定比最大顺应法后果好。别的留意,在算法完成时,分派操作中最佳顺应法和最大顺应法需求对可用块停止排序或遍历查找,而初次顺应法和临近顺应法只需求复杂查找;收受接管操作中,当收受接管的块与本来的闲暇块相邻时(有三种相邻的状况,比拟复杂),需求将这些块兼并。在算法完成时,运用数组或链表停止治理。除了内存的应用率,这里的算法开支也是操作零碎设计需求思索的一个要素。
表3-1三种内存分区治理方法的比拟
| 功课道数 | 外部 碎片 | 内部 碎片 | 硬件支撑 | 可用空 间治理 | 处理碎 片办法 | 处理空 间缺乏 | 进步作 业道数 | |
|---|---|---|---|---|---|---|---|---|
| 单道延续 分派 | 1 | 有 | 无 | 界地址存放器、越界 反省机构 | -- | -- | 掩盖 | 交流 |
| 多道固定 延续分派 | <=N (用户空间划 为N块) | 有 | 无 |
| -- | -- | ||
| 多道可变延续分派 | — | 无 | 有 |
| 紧凑 |
以上三种内存分区治理办法有一配合特色,即用户过程(或功课)在主存中多是延续寄存的。这里对它们停止比拟和总结,见表3-1。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





