本篇内容主要讲解“基于Python怎么自制视觉桌上冰球小游戏”,感兴趣的朋友不妨来看看。本文介绍的方法操作简单快捷,实用性强。下面就让小编来带大家学习“基于Python怎么自制视觉桌上冰球小游戏”吧!
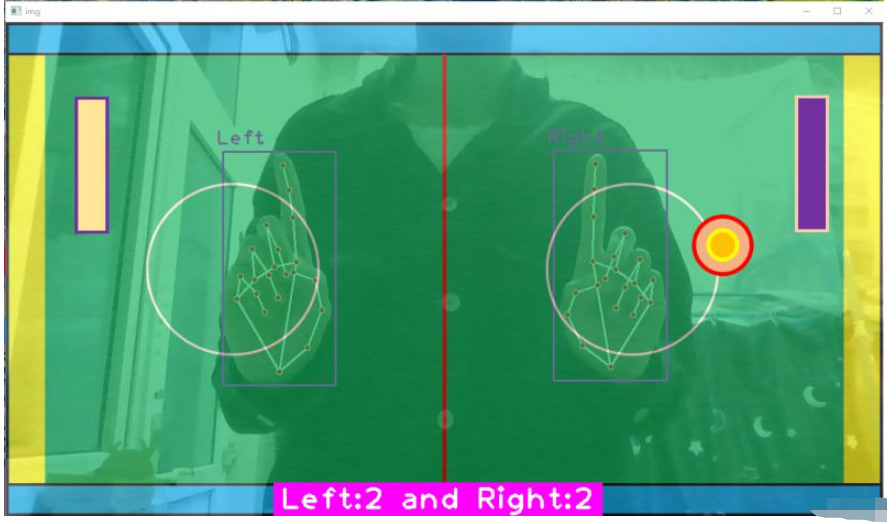
规则如下:左手控制白色球拍;右手控制紫色球拍;球拍只能上下移动;红色圆形就是冰球;球碰撞到上下两侧的蓝色边框,和两侧的球拍就会反弹;如果球进入了黄色区域,游戏结束;下面的粉色计数板,记录左右两侧各击球多少次。
pip install opencv_python==4.2.0.34 # 安装opencv
pip install mediapipe # 安装mediapipe
# pip install mediapipe --user #有user报错的话试试这个
pip install cvzone # 安装cvzone
# 导入工具包
import cv2
import cvzone
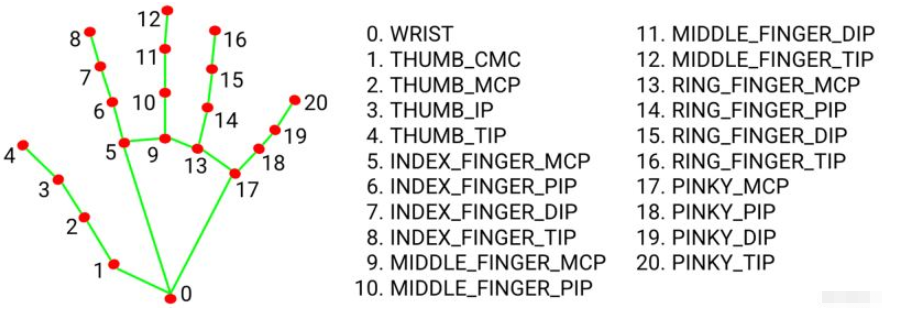
from cvzone.HandTrackingModule import HandDetector # 导入手部检测模块21个手部关键点坐标如下:
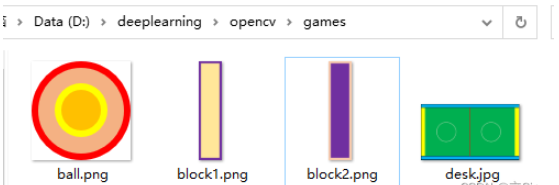
开始之前,先准备球桌的图片,球的图片,球拍的图片。我是用PPT画的图,球和球拍的图片一定要保存成 .png 格式的。放在同一个文件夹中以备读取。
(1) cvzone.HandTrackingModule.HandDetector()手部关键点检测方法
参数:
mode: 默认为 False,将输入图像视为视频流。它将尝试在第一个输入图像中检测手,并在成功检测后进一步定位手的坐标。在随后的图像中,一旦检测到所有 maxHands 手并定位了相应的手的坐标,它就会跟踪这些坐标,而不会调用另一个检测,直到它失去对任何一只手的跟踪。这减少了延迟,非常适合处理视频帧。如果设置为 True,则在每个输入图像上运行手部检测,用于处理一批静态的、可能不相关的图像。
maxHands: 最多检测几只手,默认为 2
detectionCon: 手部检测模型的最小置信值(0-1之间),超过阈值则检测成功。默认为 0.5
minTrackingCon: 坐标跟踪模型的最小置信值 (0-1之间),用于将手部坐标视为成功跟踪,不成功则在下一个输入图像上自动调用手部检测。将其设置为更高的值可以提高解决方案的稳健性,但代价是更高的延迟。如果 mode 为 True,则忽略这个参数,手部检测将在每个图像上运行。默认为 0.5
它的参数和返回值类似于官方函数 mediapipe.solutions.hands.Hands()
MULTI_HAND_LANDMARKS: 被检测/跟踪的手的集合,其中每只手被表示为21个手部地标的列表,每个地标由x, y, z组成。
MULTI_HANDEDNESS: 被检测/追踪的手是左手还是右手的集合。每只手由label(标签)和score(分数)组成。 label 是 'Left' 或 'Right' 值的字符串。 score 是预测左右手的估计概率。
(2)cvzone.HandTrackingModule.HandDetector.findHands() 找到手部关键点并绘图
参数:
img: 需要检测关键点的帧图像,格式为BGR
draw: 是否需要在原图像上绘制关键点及识别框
flipType: 图像是否需要翻转,当视频图像和我们自己不是镜像关系时,设为True就可以了
返回值:
hands: 检测到的手部信息,由0或1或2个字典组成的列表。如果检测到两只手就是由两个字典组成的列表。字典中包含:21个关键点坐标(x,y,z),检测框左上坐标及其宽高,检测框中心点坐标,检测出是哪一只手。
img: 返回绘制了关键点及连线后的图像
(3)cv2.addWeighted()图像融合
将两张图像按一定比例融合在一起,需要两张图像的size和通道数相同
两张图像按一定比例融合: cv2.addWeighted(图像1, 权重1, 图像2, 权重2, 亮度偏置)
相当于 y = a x1 + b x2 + c,其中 a、b 代表权重,c 代表亮度上提亮多少
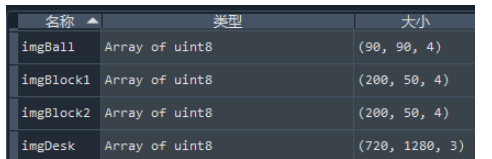
首先 cv2.imread() 中的参数 cv2.IMREAD_UNCHANGED 是指用图片的原来格式打开,包含Alpha通道。即以不改变图片的方式打开,图片是彩色那么读进来就是彩色,图片是灰度图那么读进来就是灰度图,读进来的图片的shape如下:
该部分代码主要负责手部关键点检测,融合背景图像和视频帧图像
import cv2
import cvzone
from cvzone.HandTrackingModule import HandDetector # 导入手部检测模块
#(1)捕获摄像头
cap = cv2.VideoCapture(0) # 0代表电脑自带的摄像头
cap.set(3, 1280) # 读入的图像的宽
cap.set(4, 720) # 读入的图像的高
#(2)文件配置
# 导入所有需要对图片文件
imgDesk = cv2.imread('games/desk.jpg') # 球桌的图片
imgBall = cv2.imread('games/ball.png', cv2.IMREAD_UNCHANGED) # 球的图片
imgBlock1 = cv2.imread('games/block1', cv2.IMREAD_UNCHANGED) # 球拍的图片
imgBlock2 = cv2.imread('games/block2', cv2.IMREAD_UNCHANGED) # 球拍的图片
# 调整球桌图片的size
imgDesk = cv2.resize(imgDesk, dsize=(1280,720))
#(3)参数设置
# 接收手部关键点识别的方法,最小手部检测模块置信度0.8,最多检测2只手
detector = HandDetector(detectionCon=0.8, maxHands=2)
#(4)处理帧图像
while True:
# 返回是否读取成功,以及读取后的帧图像
success, img = cap.read() # 每次执行读取一帧
# 图片翻转呈镜像关系,1代表左右翻转,0代表上下翻转
img = cv2.flip(img, flipCode=1)
# 手部关键点检测,返回每个只手的信息和绘制后的图像
hands, img = detector.findHands(img, flipType=False) # 上面翻转过了这里就不用翻转了
# 将球桌图片和视频帧图像融合在一起, 两张图的shape要相同
# 给出每张图片的融合权重, 亮度偏置为0,这样就变成了半透明的显示形式
img = cv2.addWeighted(img, 0.3, imgDesk, 0.7, 0)
#(5)添加桌球的图片,将imgBall放在球桌img的指定坐标位置
img = cvzone.overlayPNG(img, imgBall, (100,100))
# 图像展示
cv2.imshow('img', img)
# 每帧滞留1ms后消失
k = cv2.waitKey(1)
# ESC键退出程序
if k & 0XFF==27:
break
# 释放视频资源
cap.release()
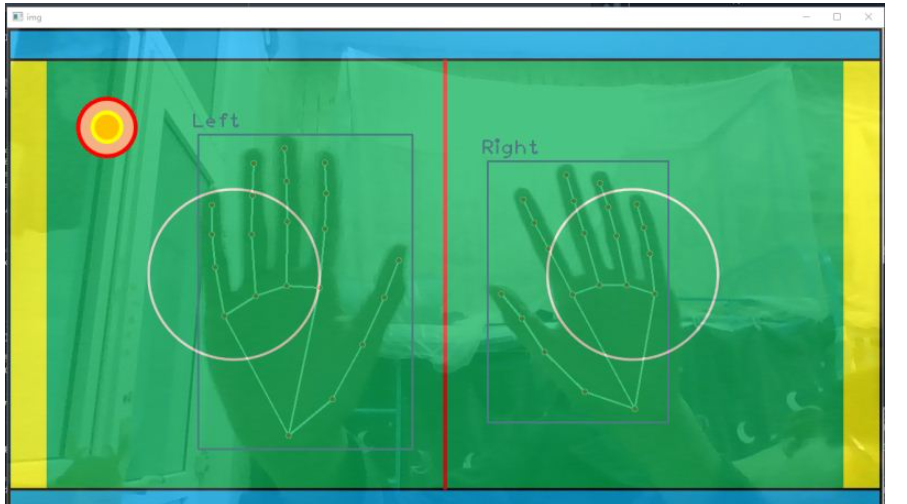
cv2.destroyAllWindows()效果图如下:
这部分主要完成两项工作,第一是左右手分别控制左侧和右侧的球拍,第二个是球以一定的速度移动。
(1)控制球拍
hand['bbox'] 中包含了手部检测框的左上角坐标和检测框的宽高,使用手掌中心点的 y 坐标来控制球拍的上下移动。由于两个球拍的shape是相同的,因此只要获取一个球拍的高度 h2 即可。使用掌心中点 y 坐标控制球拍中点的 y1 坐标,公式为:y1 = (y + h) // 2 - h2 // 2
接着使用 cvzone.overlayPNG() 就可以将球拍图片覆盖在原图片的指定区域,其中坐标参数是指覆盖区域的左上角坐标。固定横坐标,只上下移动。
(2)球移动
首先要规定球的移动速度 speedx, speedy = 10, 10 代表球每一帧沿x轴正方向移动10个像素,沿y轴正方向移动10个像素,那么球的初始合速度方向是沿图片的正右下角移动
如果球碰撞到了球桌的上下边框,就反弹。speedy = -speedy。代表x方向每帧移动的步长不变,y方向每帧移动的方向反转,即入射角等于出射角。
在上述代码中补充
import cv2
import cvzone
import numpy as np
from cvzone.HandTrackingModule import HandDetector # 导入手部检测模块
#(1)捕获摄像头
cap = cv2.VideoCapture(0) # 0代表电脑自带的摄像头
cap.set(3, 1280) # 读入的图像的宽
cap.set(4, 720) # 读入的图像的高
#(2)文件配置
# 导入所有需要对图片文件
imgDesk = cv2.imread('games/desk.jpg') # 球桌的图片
imgBall = cv2.imread('games/ball.png', cv2.IMREAD_UNCHANGED) # 球的图片
imgBlock1 = cv2.imread('games/block1.png', cv2.IMREAD_UNCHANGED) # 球拍的图片
imgBlock2 = cv2.imread('games/block2.png', cv2.IMREAD_UNCHANGED) # 球拍的图片
# 调整球桌图片的size
imgDesk = cv2.resize(imgDesk, dsize=(1280,720))
# 调整球拍的size
imgBlock1 = cv2.resize(imgBlock1, dsize=(50,200))
imgBlock2 = cv2.resize(imgBlock2, dsize=(50,200))
#(3)参数设置
# 接收手部关键点识别的方法,最小手部检测模块置信度0.8,最多检测2只手
detector = HandDetector(detectionCon=0.8, maxHands=2)
# 球的默认位置
ballpos = [100, 100]
# 球的移动速度,每帧15个像素
speedx, speedy = 10, 10
#(4)处理帧图像
while True:
# 返回是否读取成功,以及读取后的帧图像
success, img = cap.read() # 每次执行读取一帧
# 图片翻转呈镜像关系,1代表左右翻转,0代表上下翻转
img = cv2.flip(img, flipCode=1)
# 手部关键点检测,返回每个只手的信息和绘制后的图像
hands, img = detector.findHands(img, flipType=False) # 上面翻转过了这里就不用翻转了
# 将球桌图片和视频帧图像融合在一起, 两张图的shape要相同
# 给出每张图片的融合权重, 亮度偏置为0,这样就变成了半透明的显示形式
img = cv2.addWeighted(img, 0.4, imgDesk, 0.6, 0)
#(5)处理手部关键点,如果检测到手了就进行下一步
if hands:
# 遍历每检测的2只手,获取每一只手的坐标
for hand in hands:
# 获取手部检测框的左上坐标xy,宽高wh
x, y, w, h = hand['bbox']
# 获取球拍的宽高
h2, w1 = imgBlock1.shape[0:2]
# 球拍的中心y坐标,随着掌心移动
y1 = (y + h) // 2 - h2 // 2
# 如果检测到了左手
if hand['type'] == 'Left':
# 左侧的球拍x轴固定,y坐标随左手掌间中点移动
img = cvzone.overlayPNG(img, imgBlock1, (55,y1))
# 如果检测到了右手
if hand['type'] == 'Right':
# 右侧的球拍x轴固定,y坐标随右手掌间中点移动
img = cvzone.overlayPNG(img, imgBlock2, (1280-55,y1))
#(6)改变球的位置
# 如果球的y坐标在超出了桌面的上或下边框范围,调整移动方向
if ballpos[1] >= 600 or ballpos[1] <= 50:
# y方向的速度调整为反方向,那么x方向和y方向的合速度方向调整了
speedy = -speedy
ballpos[0] = ballpos[0] + speedx # 调整球的x坐标
ballpos[1] = ballpos[1] + speedy # 调整球的y坐标
#(5)添加桌球的图片,将imgBall放在球桌img的指定坐标位置
img = cvzone.overlayPNG(img, imgBall, ballpos)
# 图像展示
cv2.imshow('img', img)
# 每帧滞留1ms后消失
k = cv2.waitKey(1)
# ESC键退出程序
if k & 0XFF==27:
break
# 释放视频资源
cap.release()
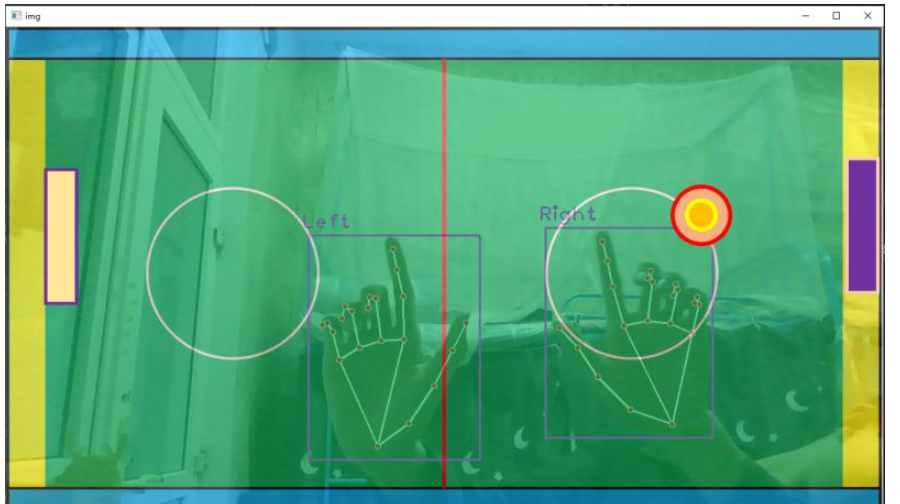
cv2.destroyAllWindows()效果图如下:
这一部分主要完成三项工作,第一是球拍击打到球,球需要反弹;第二是如果球进入黄色区域,游戏结束;第三是左右侧击球得分计数器。
(1)球拍击球
看到代码中的第(5)步,ballpos 代表球的左上角坐标(x,y),100 < ballpos[0] < 100+w1 代表球到了球拍横坐标区域范围内部了,y1 < ballpos[1] < y1+h2 代表球的y坐标在球拍y坐标内部,这时表明击球成功,speedx = -speedx 只改变沿x轴的速度方向,不改变沿y轴的速度方向。
(2)球进黄区,游戏结束
if ballpos[0] < 50 or ballpos[0] > 1150,如果球图片的左上坐标的 x 坐标,在黄区边缘,整个程序退出。当然也可以做一个游戏结束界面,我之前的博文里也有介绍,我偷个懒不写了。
(3)计数器
首先定义个变量初始化记录左右侧的击球次数 score = [0, 0],如果有一侧的球拍击中球,那么对应该侧计数加一。
上面代码是掌心控制球拍,这里改成食指指尖控制球拍中点移动。
import cv2
import cvzone
from cvzone.HandTrackingModule import HandDetector # 导入手部检测模块
#(1)捕获摄像头
cap = cv2.VideoCapture(0) # 0代表电脑自带的摄像头
cap.set(3, 1280) # 读入的图像的宽
cap.set(4, 720) # 读入的图像的高
#(2)文件配置
# 导入所有需要对图片文件
imgDesk = cv2.imread('games/desk.jpg') # 球桌的图片
imgBall = cv2.imread('games/ball.png', cv2.IMREAD_UNCHANGED) # 球的图片
imgBlock1 = cv2.imread('games/block1.png', cv2.IMREAD_UNCHANGED) # 球拍的图片
imgBlock2 = cv2.imread('games/block2.png', cv2.IMREAD_UNCHANGED) # 球拍的图片
# 调整球桌图片的size
imgDesk = cv2.resize(imgDesk, dsize=(1280,720))
# 调整球拍的size
imgBlock1 = cv2.resize(imgBlock1, dsize=(50,200))
imgBlock2 = cv2.resize(imgBlock2, dsize=(50,200))
#(3)参数设置
# 接收手部关键点识别的方法,最小手部检测模块置信度0.8,最多检测2只手
detector = HandDetector(detectionCon=0.8, maxHands=2)
# 球的默认位置
ballpos = [100, 100]
# 球的移动速度,每帧15个像素
speedx, speedy = 10, 10
# 记录是否游戏结束
gameover = False
# 记录左右的击球数
score = [0, 0]
#(4)处理帧图像
while True:
# 返回是否读取成功,以及读取后的帧图像
success, img = cap.read() # 每次执行读取一帧
# 图片翻转呈镜像关系,1代表左右翻转,0代表上下翻转
img = cv2.flip(img, flipCode=1)
# 手部关键点检测,返回每个只手的信息和绘制后的图像
hands, img = detector.findHands(img, flipType=False) # 上面翻转过了这里就不用翻转了
# 将球桌图片和视频帧图像融合在一起, 两张图的shape要相同
# 给出每张图片的融合权重, 亮度偏置为0,这样就变成了半透明的显示形式
img = cv2.addWeighted(img, 0.4, imgDesk, 0.6, 0)
#(5)处理手部关键点,如果检测到手了就进行下一步
if hands:
# 遍历每检测的2只手,获取每一只手的坐标
for hand in hands:
# 获取食指坐标(x,y,z)
x, y, z = hand['lmList'][8]
# 获取球拍的宽高
h2, w1 = imgBlock1.shape[0:2]
# 球拍的中心y坐标,随着掌心移动
y1 = y - h2 // 2
# 如果检测到了左手
if hand['type'] == 'Left':
# 左侧的球拍x轴固定,y坐标随左手掌间中点移动
img = cvzone.overlayPNG(img, imgBlock1, (100,y1))
# 检查球是否被左球拍击中, 球的xy坐标是否在球拍xy坐标附近
if 100 < ballpos[0] < 100+w1 and y1 < ballpos[1] < y1+h2:
# 满足条件代表球拍击中了,改变球的移动方向
speedx = -speedx # x方向设为反方向
# 得分加一
score[0] += 1
# 如果检测到了右手
if hand['type'] == 'Right':
# 右侧的球拍x轴固定,y坐标随右手掌间中点移动
img = cvzone.overlayPNG(img, imgBlock2, (1150,y1))
# 检查球是否被右球拍击中
if 1050 < ballpos[0] < 1050+w1 and y1 < ballpos[1] < y1+h2:
# 满足条件代表球拍击中了,改变球的移动方向
speedx = -speedx # x方向设为反方向
# 得分加一
score[1] += 1
#(6)检查球是否没接到,那么游戏结束
if ballpos[0] < 50 or ballpos[0] > 1150:
gameover = True
# 游戏结束,画面就不动了
if gameover is True:
break
# 游戏没结束就接下去执行
else:
#(7)调整球的坐标
# 如果球的y坐标在超出了桌面的上或下边框范围,调整移动方向
if ballpos[1] >= 600 or ballpos[1] <= 50:
# y方向的速度调整为反方向,那么x方向和y方向的合速度方向调整了
speedy = -speedy
# 每一整都调整xy坐标
ballpos[0] = ballpos[0] + speedx # 调整球的x坐标
ballpos[1] = ballpos[1] + speedy # 调整球的y坐标
#(8)添加桌球的图片,将imgBall放在球桌img的指定坐标位置
img = cvzone.overlayPNG(img, imgBall, ballpos)
#(9)显示记分板
cvzone.putTextRect(img, f'Left:{score[0]} and Right:{score[1]}', (400,710))
#(10)图像展示
cv2.imshow('img', img)
# 每帧滞留1ms后消失
k = cv2.waitKey(1)
# ESC键退出程序
if k & 0XFF==27:
break
# 释放视频资源
cap.release()
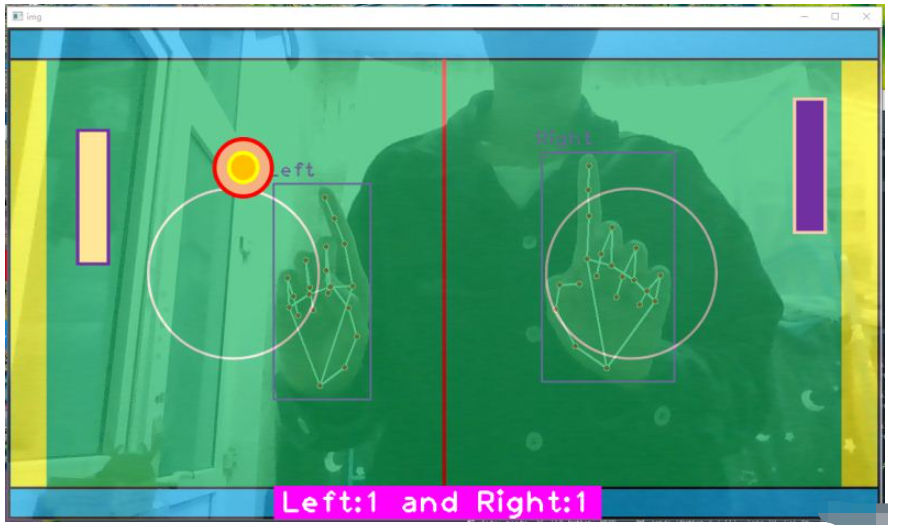
cv2.destroyAllWindows()效果图如下:
到此,相信大家对“基于Python怎么自制视觉桌上冰球小游戏”有了更深的了解,不妨来实际操作一番吧!这里是亿速云网站,更多相关内容可以进入相关频道进行查询,关注我们,继续学习!
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



