linuxеҸҜдёҚеҸҜд»ҘеҲӣе»әеӨҡдёӘиҝӣзЁӢ
иҝҷзҜҮвҖңlinuxеҸҜдёҚеҸҜд»ҘеҲӣе»әеӨҡдёӘиҝӣзЁӢвҖқж–Үз« зҡ„зҹҘиҜҶзӮ№еӨ§йғЁеҲҶдәәйғҪдёҚеӨӘзҗҶи§ЈпјҢжүҖд»Ҙе°Ҹзј–з»ҷеӨ§е®¶жҖ»з»“дәҶд»ҘдёӢеҶ…е®№пјҢеҶ…е®№иҜҰз»ҶпјҢжӯҘйӘӨжё…жҷ°пјҢе…·жңүдёҖе®ҡзҡ„еҖҹйүҙд»·еҖјпјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« иғҪжңүжүҖ收иҺ·пјҢдёӢйқўжҲ‘们дёҖиө·жқҘзңӢзңӢиҝҷзҜҮвҖңlinuxеҸҜдёҚеҸҜд»ҘеҲӣе»әеӨҡдёӘиҝӣзЁӢвҖқж–Үз« еҗ§гҖӮ
linuxеҸҜд»ҘеҲӣе»әеӨҡдёӘиҝӣзЁӢгҖӮlinuxж”ҜжҢҒеӨҡиҝӣзЁӢпјҢеҸҜд»ҘеҗҢж—¶еӨ„зҗҶеӨҡдёӘд»»еҠЎпјҢе®һзҺ°зі»з»ҹиө„жәҗзҡ„жңҖеӨ§еҲ©з”ЁгҖӮlinuxиҝӣзЁӢй—ҙзҡ„йҖҡдҝЎж–№ејҸпјҡ1гҖҒеҲ©з”Ёж— еҗҚз®ЎйҒ“pipeпјӣ2гҖҒеҲ©з”ЁжңүеҗҚз®ЎйҒ“пјҲFIFOпјүпјӣ3гҖҒеҲ©з”ЁдҝЎеҸ·singleпјӣ4гҖҒеҲ©з”Ёе…ұдә«еҶ…еӯҳпјӣ5гҖҒеҲ©з”Ёж¶ҲжҒҜйҳҹеҲ—пјӣ6гҖҒеҲ©з”ЁдҝЎеҸ·йҮҸгҖӮ
linuxеҸҜд»ҘеҲӣе»әеӨҡдёӘиҝӣзЁӢгҖӮ
linux ж”ҜжҢҒеӨҡиҝӣзЁӢгҖӮеӨҡиҝӣзЁӢзі»з»ҹзҡ„дёҖдёӘеҘҪеӨ„пјҢе°ұжҳҜеҸҜд»ҘеҗҢж—¶еӨ„зҗҶеӨҡдёӘд»»еҠЎпјҢе®һзҺ°зі»з»ҹиө„жәҗзҡ„жңҖеӨ§еҲ©з”ЁгҖӮ
第1з« linuxеӨҡиҝӣзЁӢд»Ӣз»Қ
1.1 жҰӮиҝ°
1.1.1 иҝӣзЁӢжҰӮеҝө
linuxдёӯжҠҠжӯЈеңЁиҝҗиЎҢзҡ„зЁӢеәҸз§°дҪңиҝӣзЁӢгҖӮ
зЁӢеәҸпјҡйқҷжҖҒзҡ„жҰӮеҝөпјҢе®ғжҳҜдёҖдёӘзј–иҜ‘еҘҪзҡ„дәҢиҝӣеҲ¶ж–Ү件
иҝӣзЁӢпјҡеҠЁжҖҒзҡ„жҰӮеҝөпјҢеҪ“зЁӢеәҸиҝҗиЎҢзҡ„ж—¶еҖҷпјҢзі»з»ҹдјҡиҮӘеҠЁиҝҗиЎҢдёҖдёӘеҜ№еә”иҝӣзЁӢ
иҝӣзЁӢеҢ…еҗ«дәҶиҝӣзЁӢжҺ§еҲ¶еқ—пјҲPCBпјүпјҢд»Јз Ғж®өпјҢж•°жҚ®ж®өдёүдёӘйғЁеҲҶ
иҝӣзЁӢжҺ§еҲ¶еқ—пјҡеңЁlinuxдёӯжҳҜз”ЁдёҖдёӘз»“жһ„дҪ“жқҘиЎЁзӨәзҡ„пјҢи®°еҪ•иҝӣзЁӢзҡ„зҠ¶жҖҒдҝЎжҒҜ
еғөе°ёиҝӣзЁӢпјҡзҲ¶иҝӣзЁӢдјҳе…ҲдәҺеӯҗиҝӣзЁӢйҖҖеҮә
еҰӮжһңдҪ еҲӣе»әдәҶеӯҗиҝӣзЁӢпјҢдҪҶжҳҜеңЁзҲ¶иҝӣзЁӢдёӯжІЎжңүеӣһ收иҜҘеӯҗиҝӣзЁӢзҡ„иө„жәҗпјҢйӮЈд№ҲиҜҘеӯҗиҝӣзЁӢе°ұдјҡеҸҳжҲҗеғөе°ёиҝӣзЁӢпјҢеғөе°ёиҝӣзЁӢжңҖз»Ҳдјҡз”ұзі»з»ҹдёӯдёҖдёӘеҸ«еҒҡINITзҡ„иҝӣзЁӢеӣһ收гҖӮ
initиҝӣзЁӢпјҲ1еҸ·иҝӣзЁӢпјүжҳҜзі»з»ҹеҗҜеҠЁзҡ„ж—¶еҖҷиҝҗиЎҢзҡ„第дёҖдёӘиҝӣзЁӢпјҢжҳҜжүҖжңүиҝӣзЁӢзҡ„зҘ–иҝӣзЁӢгҖӮ
1.1.2 иҝӣзЁӢжҹҘзңӢshellе‘Ҫд»Ө
top жҹҘзңӢеҠЁжҖҒзҡ„иҝӣзЁӢдҝЎжҒҜ
ps -ef жҹҘзңӢиҝӣзЁӢзҡ„иҜҰз»ҶдҝЎжҒҜ
pstree д»Ҙж ‘зҠ¶зҡ„еҪўејҸжҳҫзӨәиҝӣзЁӢзҡ„дҝЎжҒҜ
bg е°ҶжҢӮиө·зҡ„иҝӣзЁӢж”ҫеҲ°еҗҺеҸ°иҝҗиЎҢ
1.2 иҝӣзЁӢиҝҗиЎҢзҠ¶жҖҒ
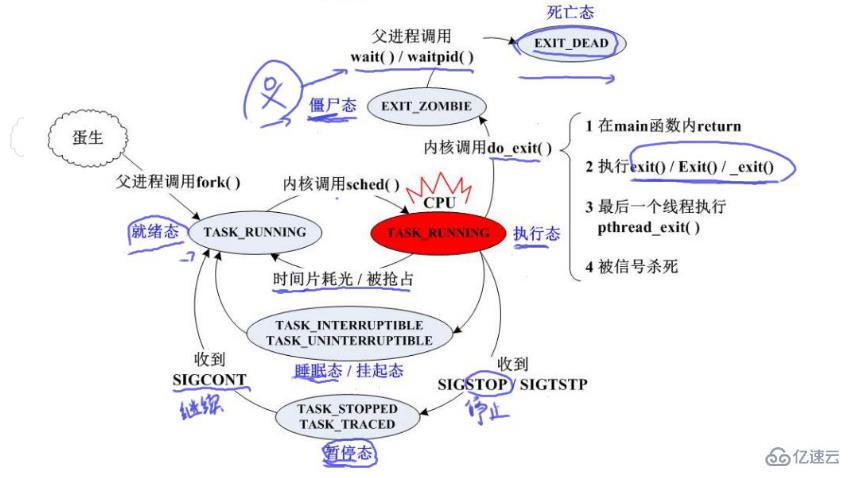
1.2.1 иҝҗиЎҢзҠ¶жҖҒ
жү§иЎҢжҖҒпјҲ RUNNINGпјүпјҡиҝӣзЁӢжӯЈеңЁеҚ жңүCPUгҖӮ
е°ұз»ӘжҖҒпјҲ RUNNINGпјүпјҡиҝӣзЁӢеӨ„дәҺзӯүеҫ…йҳҹеҲ—дёӯзӯүеҫ…и°ғеәҰгҖӮ
жө…зқЎзң пјҲ INTERRUPTABLEпјүпјҡжӯӨж—¶иҝӣзЁӢеңЁзӯүеҫ…дёҖдёӘдәӢ件зҡ„еҸ‘з”ҹжҲ–жҹҗз§Қзі»з»ҹиө„жәҗпјҢеҸҜе“Қеә”дҝЎеҸ·гҖӮ
ж·ұзқЎзң пјҲ UNINTERRUPTABLEпјүпјҡ жӯӨж—¶иҝӣзЁӢеңЁзӯүеҫ…дёҖдёӘдәӢ件зҡ„еҸ‘з”ҹжҲ–жҹҗз§Қзі»з»ҹиө„жәҗпјҢ ж— жі•е“Қеә”дҝЎеҸ·гҖӮ
еҒңжӯўжҖҒпјҲ STOPPEDпјүпјҡ жӯӨж—¶иҝӣзЁӢиў«жҡӮеҒңгҖӮ
еғөе°ёжҖҒпјҲ ZOMBIEпјүпјҡ жӯӨж—¶иҝӣзЁӢдёҚиғҪиў«и°ғеәҰпјҢдҪҶжҳҜPCBжңӘиў«йҮҠж”ҫгҖӮ
жӯ»дәЎжҖҒпјҲ DEADпјүпјҡ иҝҷжҳҜдёҖдёӘе·Із»Ҳжӯўзҡ„иҝӣзЁӢпјҢдё”PCBе°Ҷдјҡиў«йҮҠж”ҫ
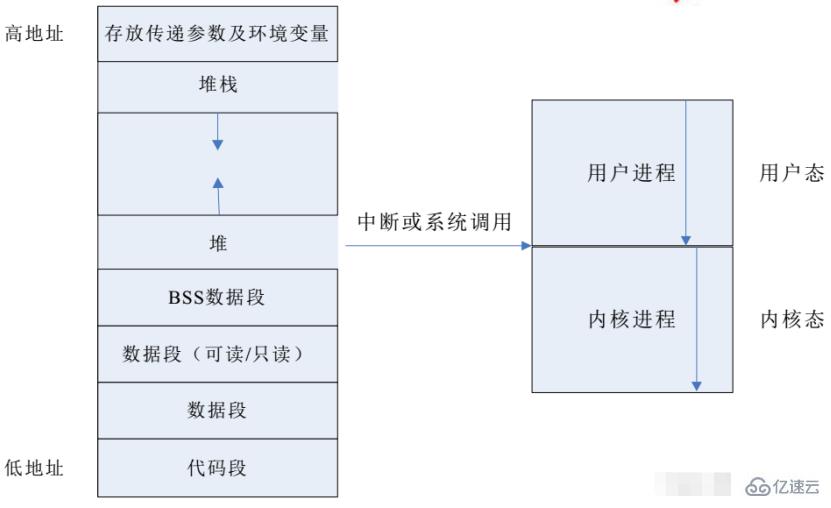
1.2.2 з”ЁжҲ·жҖҒ/еҶ…ж ёжҖҒ
еҶ…ж ёжҖҒпјҡд№ҹеҸ«еҶ…ж ёз©әй—ҙпјҢжҳҜеҶ…ж ёиҝӣзЁӢ/зәҝзЁӢжүҖеңЁзҡ„еҢәеҹҹгҖӮдё»иҰҒиҙҹиҙЈиҝҗиЎҢзі»з»ҹгҖҒ硬件дәӨдә’гҖӮ
з”ЁжҲ·жҖҒпјҡд№ҹеҸ«з”ЁжҲ·з©әй—ҙпјҢжҳҜз”ЁжҲ·иҝӣзЁӢ/зәҝзЁӢжүҖеңЁзҡ„еҢәеҹҹгҖӮдё»иҰҒз”ЁдәҺжү§иЎҢз”ЁжҲ·зЁӢеәҸгҖӮ
1гҖҒеҢәеҲ«
еҶ…ж ёжҖҒпјҡиҝҗиЎҢзҡ„д»Јз ҒдёҚеҸ—д»»дҪ•йҷҗеҲ¶пјҢCPUеҸҜд»Ҙжү§иЎҢд»»дҪ•жҢҮд»ӨгҖӮ
з”ЁжҲ·жҖҒпјҡдёҚиғҪи°ғеәҰCPUпјҢдёҚиғҪзӣҙжҺҘи®ҝ问硬件гҖӮиҝҗиЎҢзҡ„д»Јз ҒйңҖиҰҒеҸ—еҲ°CPUзҡ„еҫҲеӨҡжЈҖжҹҘпјҢдёҚиғҪзӣҙжҺҘи®ҝй—®еҶ…ж ёж•°жҚ®е’ҢзЁӢеәҸпјҢд№ҹе°ұжҳҜдёҚеҸҜд»ҘеғҸеҶ…ж ёжҖҒзәҝзЁӢдёҖж ·и®ҝй—®д»»дҪ•жңүж•Ҳең°еқҖгҖӮ
ж“ҚдҪңзі»з»ҹеңЁжү§иЎҢз”ЁжҲ·зЁӢеәҸж—¶пјҢдё»иҰҒе·ҘдҪңеңЁз”ЁжҲ·жҖҒпјҢеҸӘжңүеңЁе…¶жү§иЎҢжІЎжңүжқғйҷҗе®ҢжҲҗзҡ„д»»еҠЎж—¶жүҚдјҡеҲҮжҚўеҲ°еҶ…ж ёжҖҒгҖӮ
2гҖҒеҢәеҲҶз”ЁжҲ·жҖҒе’ҢеҶ…ж ёжҖҒеҺҹеӣ
3гҖҒз”ЁжҲ·жҖҒеҲҮжҚўеҲ°еҶ…ж ёжҖҒж–№ејҸ
пјҲ1пјүзі»з»ҹи°ғз”ЁпјҲдё»еҠЁпјү
зі»з»ҹи°ғз”ЁпјҲsystem callпјүжҳҜж“ҚдҪңзі»з»ҹжҸҗдҫӣз»ҷз”ЁжҲ·иҝӣзЁӢиҜ·жұӮж“ҚдҪңзі»з»ҹеҒҡдёҖдәӣзү№жқғж“ҚдҪңзҡ„жҺҘеҸЈпјҢеҚідёәз”ЁжҲ·иҝӣзЁӢжҸҗдҫӣжңҚеҠЎзҡ„зӘ—еҸЈгҖӮеңЁLinuxдёӢеҸҜд»ҘйҖҡиҝҮman syscallsе‘Ҫд»ӨжҹҘзңӢLinuxжҸҗдҫӣзҡ„жүҖжңүзі»з»ҹи°ғз”ЁAPIжҺҘеҸЈгҖӮ
з”ұдәҺз”ЁжҲ·жҖҒж— жі•е®ҢжҲҗжҹҗдәӣд»»еҠЎпјҢз”ЁжҲ·жҖҒдјҡиҜ·жұӮеҲҮжҚўеҲ°еҶ…ж ёжҖҒпјҢеҶ…ж ёжҖҒйҖҡиҝҮдёәз”ЁжҲ·дё“й—ЁејҖж”ҫзҡ„дёӯж–ӯе®ҢжҲҗеҲҮжҚўгҖӮ
пјҲ2пјүеӨ–еӣҙи®ҫеӨҮдёӯж–ӯпјҲиў«еҠЁпјү
еӨ–еӣҙи®ҫеӨҮеҸ‘еҮәдёӯж–ӯдҝЎеҸ·пјҢеҪ“дёӯж–ӯеҸ‘з”ҹеҗҺпјҢеҪ“еүҚиҝҗиЎҢзҡ„иҝӣзЁӢжҡӮеҒңиҝҗиЎҢпјҢ并з”ұж“ҚдҪңзі»з»ҹеҶ…ж ёеҜ№дёӯж–ӯиҝӣзЁӢеӨ„зҗҶпјҢеҰӮжһңдёӯж–ӯд№ӢеүҚCPUжү§иЎҢзҡ„жҳҜз”ЁжҲ·жҖҒзЁӢеәҸпјҢе°ұзӣёеҪ“дәҺд»Һз”ЁжҲ·жҖҒеҗ‘еҶ…ж ёжҖҒзҡ„еҲҮжҚўгҖӮ
дёӯж–ӯз”ЁдәҺдҝқиҜҒCPUжҺ§еҲ¶жқғдәӨз»ҷж“ҚдҪңзі»з»ҹпјҢд»ҺиҖҢи®©ж“ҚдҪңзі»з»ҹеҸҜд»Ҙжү§иЎҢжҹҗдәӣж“ҚдҪңгҖӮ
пјҲ3пјүејӮеёёпјҲиў«еҠЁпјү
еңЁжү§иЎҢз”ЁжҲ·зЁӢеәҸж—¶еҮәзҺ°жҹҗдәӣдёҚеҸҜзҹҘзҡ„ејӮеёёпјҢдјҡд»Һз”ЁжҲ·зЁӢеәҸеҲҮжҚўеҲ°еҶ…ж ёдёӯеӨ„зҗҶиҜҘејӮеёёзҡ„зЁӢеәҸпјҢд№ҹе°ұжҳҜеҲҮжҚўеҲ°дәҶеҶ…ж ёжҖҒгҖӮ
1.3 иҝӣзЁӢжҺҘеҸЈеҮҪж•°
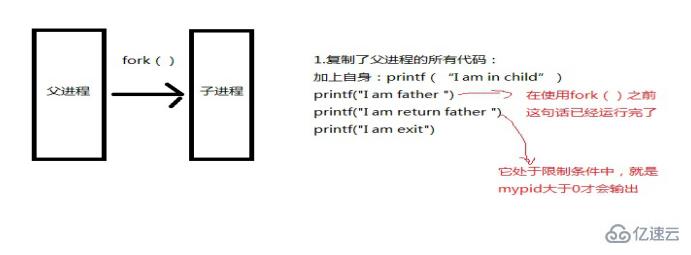
1.3.1 иҝӣзЁӢеҲӣе»ә fork/vfork
1гҖҒforkпјҲпјүгҖҒvforkпјҲпјү
пјҲ1пјүж–°е»әзҡ„иҝӣзЁӢз§°дҪңеӯҗиҝӣзЁӢпјҢе®ғеӨҚеҲ¶дәҶзҲ¶иҝӣзЁӢзҡ„жүҖжңүиө„жәҗпјҲеҸӘеңЁеҲӣе»әзҡ„йӮЈдёӘж—¶й—ҙеӨҚеҲ¶дёҖж¬ЎпјҢд»ҘеҗҺе…ЁеұҖеҸҳйҮҸеҖјжҳҜдёҚеҗҢпјүпјҢзҲ¶еӯҗиҝӣзЁӢи°Ғе…Ҳи°ҒеҗҺжҳҜдёҚзЎ®е®ҡгҖӮ
#include <unistd.h>
pid_t fork(void);
иҝ”еӣһеҖј: > 0иЎЁзӨәеӨ„дәҺзҲ¶иҝӣзЁӢдёӯ иҝҷдёӘж—¶еҖҷзҡ„иҝ”еӣһеҖје°ұжҳҜ**еӯҗиҝӣзЁӢиҝӣзЁӢidеҸ·**
==0 иЎЁзӨәеӨ„дәҺеӯҗиҝӣзЁӢдёӯ
< 0 еҲӣе»әиҝӣзЁӢеҮәй”ҷ
#include <sys/types.h>
#include <unistd.h>
pid_t vfork(void);
пјҲ2пјү**vforkпјҲпјү**еӯҗиҝӣзЁӢе…ұдә«дәҶзҲ¶иҝӣзЁӢзҡ„жүҖжңүиө„жәҗпјҢе®ғдёҖе®ҡжҳҜеӯҗиҝӣзЁӢе…ҲиҝҗиЎҢпјҢ然еҗҺжүҚжҳҜзҲ¶иҝӣзЁӢиҝҗиЎҢпјҲеҚідҪҝдҪ еҠ дёҠsleepпјҲпјүдәәдёәеҺ»е№Іжү°д№ҹжҳҜжІЎжңүз”Ёзҡ„пјү
пјҲ3пјүжіЁж„Ҹ
еӯҗиҝӣзЁӢдёӯдҪҝз”ЁдәҶexitпјҲпјүи·ҹжІЎжңүдҪҝз”Ёз»“жһңе®Ңе…ЁдёҚдёҖж ·
зҲ¶еӯҗиҝӣзЁӢдёӯжҳҜеҗҰдҪҝз”ЁsleepпјҲпјүжқҘи®©еҮәcpuж—¶й—ҙзүҮд№ҹжҳҜдёҚдёҖж ·зҡ„
зҲ¶иҝӣзЁӢдёӯжҳҜеҗҰдҪҝз”ЁwaitпјҲпјүпјҢwaitpidпјҲпјүз»“жһңд№ҹжҳҜдёҚдёҖж ·зҡ„
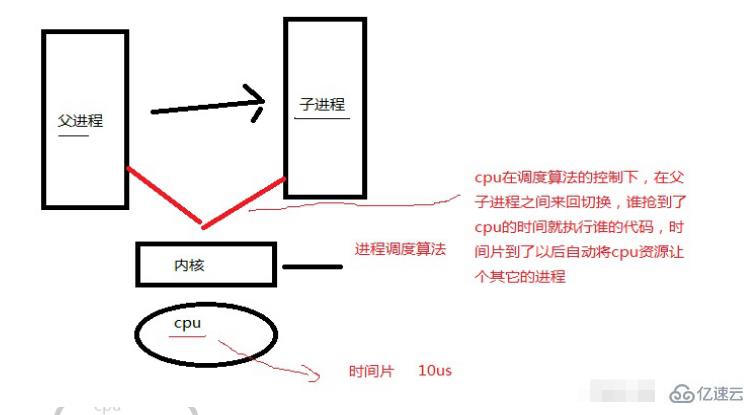
пјҲ4пјүиҝӣзЁӢеҲҮжҚўжү§иЎҢ
1.3.2 иҝӣзЁӢзҡ„йҖҖеҮә exit/_exit
1гҖҒexitпјҲпјүгҖҒ_exitпјҲпјү
#include <stdlib.h>
void exit(int status);
void _exit(int status);
еҸӮж•°пјҡ
status --->иҝӣзЁӢйҖҖеҮәж—¶зҡ„зҠ¶жҖҒ
statusеңЁе®һйҷ…зј–еҶҷзЁӢеәҸдёӯжҳҜеҸҜд»ҘиҮӘе·ұзәҰе®ҡзҡ„пјҡ
жҜ”еҰӮпјҡ exitпјҲ2пјү----гҖӢеҮәзҺ°жү“ејҖж–Ү件й”ҷиҜҜ
exitпјҲ3пјү----гҖӢеҮәзҺ°ж®өй”ҷиҜҜпјҲйҖ»иҫ‘й”ҷиҜҜпјү
exitпјҲ0пјү----гҖӢжӯЈеёёйҖҖеҮә
иҝ”еӣһпјҡ void
еҢәеҲ«пјҡ
exitпјҲпјүеңЁйҖҖеҮәзҡ„ж—¶еҖҷдјҡеҲ·ж–°IOзј“еҶІеҢәпјҢ然еҗҺжүҚйҖҖеҮәпјҲиҙҹиҙЈд»»зҡ„йҖҖеҮәпјү
_exit() зӣҙжҺҘйҖҖеҮәпјҲдёҚиҙҹиҙЈд»»зҡ„йҖҖеҮәпјү
1.3.3 зӯүеҫ…еӯҗиҝӣзЁӢйҖҖеҮәпјҲзҲ¶иҝӣзЁӢеӣһ收иө„жәҗпјүwait/waitpid
1гҖҒwaitпјҲпјү
#include <sys/wait.h>
pid_t wait(int *stat_loc);
иҝ”еӣһеҖјпјҡдҪ еӣһ收зҡ„йӮЈдёӘеӯҗиҝӣзЁӢзҡ„idеҸ·
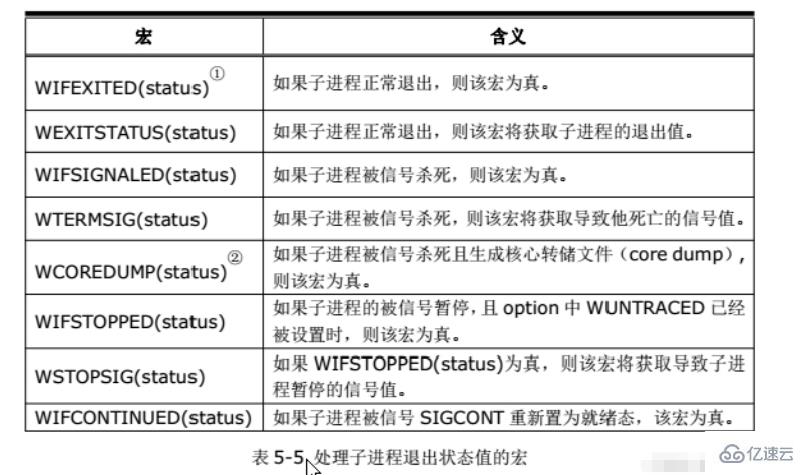
еҸӮж•°пјҡstat_loc --гҖӢдҝқеӯҳеӯҗиҝӣзЁӢйҖҖеҮәж—¶зҡ„зҠ¶жҖҒдҝЎжҒҜ(дёҚд»…д»…еҸӘжҳҜиҝ”еӣһеҖј)
stat_locйҮҢйқўдёҚд»…д»…еҸӘжҳҜдҝқеӯҳдәҶexitйҖҖеҮәж—¶зҡ„ж•°еҖјпјҢе®ғиҝҳдҝқеӯҳдәҶеӯҗиҝӣзЁӢйҖҖеҮәж—¶жҳҜе“ӘдёӘдҝЎеҸ·и®©е®ғйҖҖеҮәзҡ„пјҢ
еҮәй”ҷдәҶжҳҜд»Җд№ҲеҺҹеӣ еҜјиҮҙзҡ„гҖӮ
2гҖҒ waitpidпјҲпјү
pid_t waitpid(pid_t pid, int *stat_loc, int options); еӣһ收еӯҗиҝӣзЁӢ/иҝӣзЁӢз»„
еҸӮж•°пјҡ pid ----гҖӢдҪ жҢҮе®ҡиҰҒеӣһ收зҡ„йӮЈдёӘеӯҗиҝӣзЁӢзҡ„id
<-1 зӯүеҫ…иҝӣзЁӢз»„еҸ·дёә-pidдёӯзҡ„жҹҗдёӘеӯҗиҝӣзЁӢйҖҖеҮә
-1 зӯүеҫ…д»»ж„ҸдёҖдёӘеӯҗиҝӣзЁӢ
==0 зӯүеҫ…жң¬иҝӣзЁӢз»„дёӯзҡ„жҹҗдёӘеӯҗиҝӣзЁӢйҖҖеҮә
> 0 зӯүеҫ…PIDдёәpidзҡ„иҝӣзЁӢ
stat_loc-----гҖӢеӯҳж”ҫеӯҗиҝӣзЁӢйҖҖеҮәзҠ¶жҖҒпјҲеҸҜдёәNULLпјү
options ----гҖӢдёҖиҲ¬и®ҫзҪ®дёә0
WNOHANG еҪ“жІЎжңүеӯҗиҝӣзЁӢж—¶з«ӢеҚіиҝ”еӣһ
WUNTRACED еҪ“жңүеӯҗиҝӣзЁӢиў«жҡӮеҒңж—¶з«ӢеҚіиҝ”еӣһ
WCONTINUED еҪ“жңүеӯҗиҝӣзЁӢ收еҲ°SIGCONTз«ӢеҚіиҝ”еӣһ
иҝ”еӣһеҖјпјҡ-1 жү§иЎҢеӨұиҙҘ
> 0 жҲҗеҠҹ иҝ”еӣһеҖјдёәиў«еӣһ收зҡ„иҝӣзЁӢзҡ„PID
0 жҢҮе®ҡдәҶWNOHANGпјҢдё”жІЎжңүе·ІйҖҖеҮәзҡ„еӯҗиҝӣзЁӢ
1.3.4 иҺ·еҸ–иҝӣзЁӢзҡ„idвҖ“getpid
пјҲ1пјүиҺ·еҸ–иҮӘе·ұзҡ„id getpidпјҲпјү
#include <unistd.h>
pid_t getpid(void); иҝ”еӣһеҖјпјҡе°ұжҳҜиҜҘиҝӣзЁӢзҡ„idеҸ·
пјҲ2пјү иҺ·еҸ–зҲ¶иҝӣзЁӢid getppidпјҲпјү
#include <unistd.h>
pid_t getppid(void); иҝ”еӣһеҖјпјҡе°ұжҳҜзҲ¶иҝӣзЁӢзҡ„idеҸ·
第2з« linuxеӨҡиҝӣзЁӢй—ҙйҖҡдҝЎж–№ејҸ
дёҚз®ЎжҳҜиҝӣзЁӢй—ҙзҡ„йҖҡдҝЎпјҢиҝҳжҳҜзәҝзЁӢй—ҙзҡ„йҖҡдҝЎгҖӮж— йқһйғҪжҳҜдёәдәҶи§ЈеҶідёҖдёӘй—®йўҳпјҡе°ұжҳҜе…ұдә«иө„жәҗзҡ„еҲҶй…ҚпјҲеҚҸи°ғдёҚеҗҢзҡ„иҝӣзЁӢ/зәҝзЁӢеҜ№дәҺе…ұдә«зҡ„иө„жәҗзҡ„и®ҝй—®пјү
2.1 иҝӣзЁӢй—ҙзҡ„йҖҡдҝЎж–№ејҸ
1гҖҒдј з»ҹзҡ„иҝӣзЁӢй—ҙйҖҡдҝЎж–№ејҸ
ж— еҗҚз®ЎйҒ“
жңүеҗҚз®ЎйҒ“
дҝЎеҸ·
2гҖҒSystem V IPCеҜ№иұЎ
е…ұдә«еҶ…еӯҳ
ж¶ҲжҒҜйҳҹеҲ—
дҝЎеҸ·йҮҸ
3гҖҒBSD
зҪ‘з»ңеҘ—жҺҘеӯ—пјҲsocketпјү
2.1.1 ж— еҗҚз®ЎйҒ“pipe
1гҖҒзү№зӮ№пјҡжңҖеҺҹе§Ӣзҡ„иҝӣзЁӢй—ҙзҡ„йҖҡдҝЎж–№ејҸ
е®ғеҸӘиғҪеңЁе…·жңүдәІзјҳе…ізі»зҡ„иҝӣзЁӢй—ҙйҖҡдҝЎпјҲзҲ¶еӯҗиҝӣзЁӢпјҢе…„ејҹиҝӣзЁӢпјүпјӣ
е®ғжІЎжңүеҗҚеӯ—пјҲжҳҜеӯҳеңЁзҡ„пјүпјӣ
еҸҜд»ҘеңЁlinuxе’Ңwindowsд№Ӣй—ҙзҡ„е…ұдә«дёӯеҲӣе»әпјҲж №жң¬е°ұдёҚдјҡз”ҹжҲҗз®ЎйҒ“ж–Ү件пјүпјҢдҪҶжҳҜжңүеҗҚз®ЎйҒ“е°ұдёҚеҸҜд»ҘдәҶпјҲз”ҹжҲҗз®ЎйҒ“ж–Ү件пјүпјӣ
еҚҠеҸҢе·ҘйҖҡдҝЎгҖӮ
2гҖҒж— еҗҚз®ЎйҒ“зҡ„дҪҝз”Ё
пјҲ1пјүеҲӣе»әpipeпјҲпјү
#include <unistd.h>
int pipe(int fildes[2]);
еҸӮж•°пјҡfildes[2]йҮҢйқўж”ҫзҡ„жҳҜдёӨдёӘж–Ү件жҸҸиҝ°з¬Ұfildes[0]пјҢfildes[1]
fildes[0] иҜ»з«Ҝ
fildes[1] еҶҷз«Ҝ
иҝ”еӣһеҖјпјҡжҲҗеҠҹиҝ”еӣһ0 еӨұиҙҘиҝ”еӣһ-1
пјҲ2пјүpipeдҝЎжҒҜ收еҸ‘
myid = fork(); //еҲӣе»әеӯҗиҝӣзЁӢ
if(myid == 0)
{
write(fd[1],"dad,thanks!",20); //еӯҗиҝӣзЁӢеҗ‘зҲ¶иҝӣзЁӢеҸ‘йҖҒж¶ҲжҒҜ
close(fd[1]);
close(fd[0]);
exit(0);
}
else if(myid > 0)
{
read(fd[0],buf,20); //зҲ¶иҝӣзЁӢйҳ»еЎһжҺҘеҸ—еӯҗиҝӣзЁӢж¶ҲжҒҜ
printf("buf is:%s\n",buf);
close(fd[1]);
close(fd[0]);
}
2.1.2 жңүеҗҚз®ЎйҒ“пјҲFIFOпјү
1гҖҒзү№зӮ№пјҡйҡҸдҫҝдёӨдёӘиҝӣзЁӢд№Ӣй—ҙйғҪиЎҢ
дёҚиғҪеңЁlinuxе’Ңwindowsд№Ӣй—ҙзҡ„е…ұдә«дёӯеҲӣе»әпјӣ
дҝқиҜҒеҶҷе…Ҙзҡ„еҺҹеӯҗжҖ§пјҲеҺҹеӯҗжҖ§пјҡиҰҒд№ҲдёҚеҒҡпјҢиҰҒеҒҡе°ұдёҖеҸЈж°”еҒҡе®ҢдёҚеҸ—еӨ–з•Ңзҡ„е№Іжү°пјүпјӣ
жңүеҗҚз®ЎйҒ“дёҚиғҪеӨҹиҰҶзӣ–зқҖеҲӣе»әпјҲдёҖиҲ¬д»Јз ҒдёӯдҪҝз”ЁaccessпјҲпјүеҮҪж•°жқҘеҲӨж–ӯжҳҜеҗҰеӯҳеңЁпјҢеҰӮжһңе·Із»ҸеӯҳеңЁеҗҢеҗҚзҡ„з®ЎйҒ“пјҢе°ұдёҚиғҪеҶҚж¬ЎеҲӣе»әпјүпјӣ
дҪҝз”Ёе®ҢжҜ•и®°еҫ—е…ій—ӯпјӣ
еҪ“з®ЎйҒ“д»ҘеҸӘиҜ»зҡ„ж–№ејҸжү“ејҖпјҢдјҡйҳ»еЎһпјҢзӣҙеҲ°жңүеҸҰеӨ–дёҖдёӘиҝӣзЁӢд»ҘеҸӘеҶҷзҡ„ж–№ејҸжү“ејҖиҝҷдёӘз®ЎйҒ“пјҢйӮЈд№Ҳе°ұдёҚйҳ»еЎһдәҶпјӣеҰӮжһңжҳҜд»ҘеҸҜиҜ»еҶҷзҡ„ж–№ејҸжү“ејҖпјҢе°ұдёҚдјҡйҳ»еЎһдәҶгҖӮ
е…ЁеҸҢе·ҘйҖҡдҝЎпјҢеҚҠеҸҢйҒ“гҖӮ
2гҖҒжңүеҗҚз®ЎйҒ“зҡ„дҪҝз”Ё
пјҲ1пјүеҲӣе»әmkfifoпјҲпјү
#include <sys/types.h>
#include <sys/stat.h>
int mkfifo(const char *pathname, mode_t mode);
еҸӮж•°пјҡpathname жңүеҗҚз®ЎйҒ“зҡ„и·Ҝеҫ„еҗҚ
modeпјҡжқғйҷҗ 0666
иҝ”еӣһеҖјпјҡ0 жҲҗеҠҹ
-1 еӨұиҙҘ
пјҲ2пјүFIFOиҝӣзЁӢдҝЎжҒҜ收еҸ‘
fifo_read.c :-----------гҖӢ
#define FIFO1 "myfifo1"
#define FIFO2 "myfifo2"
int main(void) {
int my_fd,fd1,fd2;
char r_buff[30];
char w_buff[30];
bzero(r_buff,30);
if(access(FIFO1,F_OK)==-1) {
my_fd = mkfifo(FIFO1,0664); //еҲӣе»әз®ЎйҒ“1
if(my_fd == -1) {
perror("failed!\n");
return -1;
}
}
if(access(FIFO2,F_OK)==-1) {
my_fd = mkfifo(FIFO2,0664); //еҲӣе»әз®ЎйҒ“2
if(my_fd == -1) {
perror("failed!\n");
return -1;
}
}
fd1 = open(FIFO1,O_RDONLY); //еҸӘиҜ»жү“ејҖз®ЎйҒ“1пјҢиҺ·еҸ–з®ЎйҒ“ж–Ү件жҸҸиҝ°з¬Ұ
if(fd1==-1) {
printf("open fifo1 file failed!\n");
exit(0);
}
fd2 = open(FIFO2,O_WRONLY); //еҸӘеҶҷжү“ејҖз®ЎйҒ“2пјҢиҺ·еҸ–з®ЎйҒ“ж–Ү件жҸҸиҝ°з¬Ұ
if(fd2==-1) {
printf("open fifo2 file failed!\n");
exit(0);
}
while(1) {
bzero(r_buff,30);
read(fd1,r_buff,sizeof(r_buff)); //иҜ»еҸ–з®ЎйҒ“1зҡ„ж¶ҲжҒҜ
printf("client receive message is: %s\n",r_buff);
printf("client please input a message!\n");
fgets(w_buff,30,stdin);
write(fd2,w_buff,30); //еҸ‘йҖҒдҝЎжҒҜз»ҷз®ЎйҒ“2
}
close(fd2);
close(fd1);
return 0;
}
fifo_write.c :-----------гҖӢ
#define FIFO1 "myfifo1"
#define FIFO2 "myfifo2"
int main(void)
{
int my_fd,fd1,fd2;
char w_buff[30];
char r_buff[30];
bzero(w_buff,30);
if(access(FIFO1,F_OK)==-1) {
my_fd = mkfifo(FIFO1,0664);
if(my_fd == -1) {
perror("failed!\n");
return -1;
}
}
if(access(FIFO2,F_OK)==-1) {
my_fd = mkfifo(FIFO2,0664);
if(my_fd == -1) {
perror("failed!\n");
return -1;
}
}
fd1 = open(FIFO1,O_WRONLY);
if(fd1==-1) {
printf("open fifo1 file failed!\n");
exit(0);
}
fd2 = open(FIFO2,O_RDONLY);
if(fd2==-1) {
printf("open fifo2 file failed!\n");
exit(0);
}
while(1) {
bzero(w_buff,30);
printf("server please input a message!\n");
fgets(w_buff,30,stdin);
write(fd1,w_buff,strlen(w_buff)); //еҶҷе…Ҙж¶ҲжҒҜеҲ°з®ЎйҒ“1ж–Ү件
read(fd2,r_buff,30); //иҜ»еҸ–дҝЎжҒҜд»Һз®ЎйҒ“2
printf("server receive message is:%s\n",r_buff);
}
close(fd1);
close(fd2);
return 0;
}
2.1.3 дҝЎеҸ· single
зЁӢеәҸ(иҝӣзЁӢ)еңЁиҝҗиЎҢиҝҮзЁӢдёӯпјҢеӨ–з•ҢдёҚе®ҡж—¶дјҡеҸ‘дҝЎеҸ·з»ҷиҜҘзЁӢеәҸпјҢиҝҷдёӘж—¶еҖҷиҜҘзЁӢеәҸйқўдёҙзқҖдёӨз§ҚйҖүжӢ©пјҡ
дёҚзҗҶе®ғпјҲйҳ»еЎһ/еҝҪз•Ҙпјү
йҳ»еЎһпјҡжҳҜжҢҮе°ҶдҝЎеҸ·жҢӮиө·пјҢзӯүеҲ°зЁӢеәҸиҝҗиЎҢе®ҢдәҶеҶҚеҺ»е“Қеә”
еҝҪз•ҘпјҡиҲҚејғиҝҷдёӘдҝЎеҸ·
е“Қеә”е®ғ
1гҖҒlinuxеҪ“дёӯжңүе“ӘдәӣдҝЎеҸ·пјҡkill -l жҹҘзңӢ
1) SIGHUP 2) SIGINT 3) SIGQUIT 4) SIGILL 5) SIGTRAP
6) SIGABRT 7) SIGBUS 8) SIGFPE 9) SIGKILL 10) SIGUSR1
11) SIGSEGV 12) SIGUSR2 13) SIGPIPE 14) SIGALRM 15) SIGTERM
16) SIGSTKFLT 17) SIGCHLD 18) SIGCONT 19) SIGSTOP 20) SIGTSTP
21) SIGTTIN 22) SIGTTOU 23) SIGURG 24) SIGXCPU 25) SIGXFSZ
26) SIGVTALRM 27) SIGPROF 28) SIGWINCH 29) SIGIO 30) SIGPWR
31) SIGSYS 34) SIGRTMIN 35) SIGRTMIN+1 36) SIGRTMIN+2 37) SIGRTMIN+3
38) SIGRTMIN+4 39) SIGRTMIN+5 40) SIGRTMIN+6 41) SIGRTMIN+7 42) SIGRTMIN+8
43) SIGRTMIN+9 44) SIGRTMIN+10 45) SIGRTMIN+11 46) SIGRTMIN+12 47) SIGRTMIN+13
48) SIGRTMIN+14 49) SIGRTMIN+15 50) SIGRTMAX-14 51) SIGRTMAX-13 52) SIGRTMAX-12
53) SIGRTMAX-11 54) SIGRTMAX-10 55) SIGRTMAX-9 56) SIGRTMAX-8 57) SIGRTMAX-7
58) SIGRTMAX-6 59) SIGRTMAX-5 60) SIGRTMAX-4 61) SIGRTMAX-3 62) SIGRTMAX-2
63) SIGRTMAX-1 64) SIGRTMAX
пјҲ1пјү1еҲ°31еҸ·дҝЎеҸ·з§°дҪңйқһе®һж—¶дҝЎеҸ·пјҡдёҚж”ҜжҢҒйҳҹеҲ—пјҲеҰӮжһңеҗҢж—¶жқҘдәҶеӨҡдёӘдҝЎеҸ·пјҢе“Қеә”жҳҜжІЎжңү规еҫӢпјү
пјҲ2пјүз”ЁжҲ·иҮӘе®ҡд№үзҡ„дҝЎеҸ· 10) SIGUSR1 12) SIGUSR2
пјҲ3пјү 34еҲ°64еҸ·дҝЎеҸ·еҸ«еҒҡе®һж—¶дҝЎеҸ·пјҡж”ҜжҢҒйҳҹеҲ—пјҢжҳҜlinuxзі»з»ҹдёӯеҗҺйқўж·»еҠ иҝӣжқҘзҡ„дҝЎеҸ·
дҝЎеҸ·зұ»дјјдәҺдёӯж–ӯпјҡ 硬件 иҪҜ件
д»ҘдёҠдҝЎеҸ·жңүдёӨдёӘеҫҲзү№ж®ҠпјҡSIGKILLпјҢSIGSTOPдёҚиғҪеӨҹиў«еҝҪз•ҘпјҢд№ҹдёҚиғҪиў«йҳ»еЎһ
2гҖҒдҝЎеҸ·зӣёе…ізҡ„ж“ҚдҪңеҮҪж•°
пјҲ1пјүеҸ‘йҖҒдҝЎеҸ·killпјҲпјү
#include <signal.h>
int kill(pid_t pid, int sig);
еҸӮж•°пјҡ
pid ----гҖӢиҝӣзЁӢзҡ„id
жӯЈж•°пјҡиҰҒжҺҘ收дҝЎеҸ·зҡ„иҝӣзЁӢзҡ„иҝӣзЁӢеҸ·
0пјҡдҝЎеҸ·иў«еҸ‘йҖҒеҲ°жүҖжңүе’ҢpidиҝӣзЁӢеңЁеҗҢдёҖдёӘиҝӣзЁӢз»„зҡ„иҝӣзЁӢ
-1пјҡдҝЎеҸ·еҸ‘з»ҷжүҖжңүзҡ„иҝӣзЁӢиЎЁдёӯзҡ„иҝӣзЁӢ(йҷӨдәҶиҝӣзЁӢеҸ·жңҖеӨ§зҡ„иҝӣзЁӢеӨ–)
sig ----гҖӢдҝЎеҸ·еҗҚеӯ—
иҝ”еӣһеҖјпјҡ0 жҲҗеҠҹ
-1 еҮәй”ҷ
пјҲ2пјүдҝЎеҸ·зҡ„жҚ•жҚү signalпјҲпјү
#include <signal.h>
void (*signal(int sig, void (*func)(int)))(int); // SIGKILL
еҸӮж•°пјҡsig ----гҖӢдҪ йңҖиҰҒжҚ•жҚүзҡ„йӮЈдёӘдҝЎеҸ·
void (*func)(int) ----гҖӢеҮҪж•°жҢҮй’Ҳ,еӣһи°ғеҮҪж•°пјҢжҚ•жҚүеҲ°еҜ№еә”зҡ„дҝЎеҸ·зҡ„ж—¶еҖҷе°ұи°ғз”ЁиҜҘеҮҪж•°пјӣ第дәҢдёӘеҸӮж•°йҷӨдәҶеҸҜд»Ҙдј йҖ’дёҖдёӘеҮҪж•°жҢҮй’Ҳж„ҸеӨ–пјҢиҝҳеҸҜд»ҘдҪҝз”Ёд»ҘдёӢдёӨдёӘе®Ҹе®ҡд№үпјҡ
SIG_IGN ---->дҪ жҚ•жҚүеҲ°зҡ„йӮЈдёӘдҝЎеҸ·дјҡиў«еҝҪз•Ҙ
SIG_DFL-----гҖӢдҪ жҚ•жҚүзҡ„дҝЎеҸ·дјҡйҮҮз”Ёзі»з»ҹй»ҳи®Өзҡ„ж–№ејҸе“Қеә”
иҝ”еӣһеҖјпјҡжҲҗеҠҹпјҡи®ҫзҪ®д№ӢеүҚзҡ„дҝЎеҸ·еӨ„зҗҶж–№ејҸ
еҮәй”ҷпјҡ-1
пјҲ3пјүзӯүеҫ…дҝЎеҸ· pauseпјҲпјү
#include <unistd.h>
int pause(void);
иҝ”еӣһеҖјпјҡ-1 жҠҠerrorеҖји®ҫдёәEINTR
0 жҲҗеҠҹ
пјҲ4пјүдҝЎеҸ·зҡ„йҳ»еЎһ
жҜҸдёӘиҝӣзЁӢйғҪжңүеұһдәҺе®ғиҮӘе·ұзҡ„дёҖдёӘдҝЎеҸ·жҺ©з ҒпјҲд№ҹе°ұжҳҜиҜҘиҝӣзЁӢеңЁиҝҗиЎҢзҡ„иҝҮзЁӢдёӯдјҡйҳ»еЎһжҺүзҡ„йӮЈдәӣдҝЎеҸ·е°ұиў«з§°дҪңдҝЎеҸ·жҺ©з ҒпјүгҖӮ
е…ідәҺдҝЎеҸ·жҺ©з Ғж“ҚдҪңзҡ„дёҖзі»еҲ—еҮҪж•°пјҡ
#include <signal.h>
int sigemptyset(sigset_t *set)пјҡжё…з©әдҝЎеҸ·жҺ©з Ғ
int sigfillset(sigset_t *set)пјҡе°ҶжүҖжңүзҡ„дҝЎеҸ·ж·»еҠ еҲ°дҝЎеҸ·жҺ©з Ғдёӯ
int sigaddset(sigset_t *set, int signum)пјҡе°Ҷзү№е®ҡзҡ„дҝЎеҸ·ж·»еҠ еҲ°дҝЎеҸ·жҺ©з Ғдёӯ
int sigdelset(sigset_t *set, int signum)пјҡе°Ҷзү№е®ҡзҡ„дҝЎеҸ·д»ҺжҺ©з ҒдёӯеҲ йҷӨ
int sigismember(const sigset_t *set, int signum)пјҡеҲӨж–ӯжҹҗдёӘдҝЎеҸ·еңЁдёҚеңЁиҜҘжҺ©з Ғдёӯ
еҸӮж•°пјҡsigset_t ----гҖӢеӯҳеӮЁиў«иҝӣзЁӢйҳ»еЎһзҡ„дҝЎеҸ·
пјҲ5пјүй…ҚзҪ®дҝЎеҸ·жҺ©з Ғ sigprocmaskпјҲпјүвҖ”йҳ»еЎһжҲ–и§ЈйҷӨйҳ»еЎһдҝЎеҸ·
#include <signal.h>
int sigprocmask(int how, const sigset_t *restrict set, sigset_t *restrict oset)
еҸӮж•°пјҡ
how ---гҖӢSIG_BLOCK е°ҶsetжүҖеҢ…еҗ«зҡ„дҝЎеҸ·ж·»еҠ еҲ°еҺҹжқҘзҡ„дҝЎеҸ·жҺ©з Ғдёӯ
SIG_SETMASK з”ЁsetеҺ»жӣҝжҚўеҺҹжқҘзҡ„дҝЎеҸ·жҺ©з Ғ
SIG_UNBLOCK е°ҶsetдёӯеҢ…еҗ«зҡ„дҝЎеҸ·д»ҺеҺҹжқҘзҡ„жҺ©з ҒдёӯеҲ йҷӨ
set ---гҖӢж–°зҡ„дҝЎеҸ·жҺ©з Ғ
oset ---гҖӢеҺҹжң¬зҡ„дҝЎеҸ·жҺ©з Ғ
еҺҹжң¬иҝӣзЁӢдёӯдҝЎеҸ·жҺ©з ҒеҢ…еҗ«дәҶпјҡSIGINT ,SIGCONT
пјҲ6пјүжҚ•жҚүжҢҮе®ҡдҝЎеҸ·е№¶иҺ·еҸ–дҝЎеҸ·жҗәеёҰдҝЎжҒҜsigactionпјҲпјү
#include <signal.h>
int sigaction(int sig, const struct sigaction *restrict act, struct sigaction *restrict oact);
еҸӮж•°пјҡ
sig ---гҖӢдҪ иҰҒжҚ•жҚүзҡ„йӮЈдёӘдҝЎеҸ·
act ---гҖӢдҪ йңҖиҰҒжҚ•жҚүзҡ„дҝЎеҸ·еҜ№еә”зҡ„е“Қеә”еҮҪж•°е°ұе®ҡд№үеңЁиҝҷдёӘз»“жһ„дҪ“
oact ---гҖӢеҺҹжқҘзҡ„
struct sigaction
{
void(*) (int) sa_handler ----гҖӢ дҝЎеҸ·зҡ„е“Қеә”еҮҪж•°
sigset_t sa_mask ---гҖӢдҝЎеҸ·зҡ„жҺ©з Ғ
int sa_flags ----гҖӢ SA_SIGINFO
void(*) (int, siginfo_t * пјҢvoid пјү---гҖӢдҝЎеҸ·зҡ„е“Қеә”еҮҪж•°
}
sa_flags ---гҖӢзӯүдәҺSA_SIGINFOпјҢйӮЈд№ҲдҝЎеҸ·зҡ„е“Қеә”еҮҪж•°жҳҜvoid(*) (int, siginfo_t * пјҢvoid пјү
дёҚзӯүдәҺпјҢйӮЈд№ҲдҝЎеҸ·зҡ„е“Қеә”еҮҪж•°жҳҜvoid(*) (int)
siginfo_t---гҖӢ/usr/include/i386-linux-gnu/bits/siginfo.h дҝқеӯҳзҡ„жҳҜдҝЎеҸ·зҡ„зҠ¶жҖҒдҝЎжҒҜпјҢдҝЎеҸ·зҡ„ж ҮеҸ·пјҢеҸ‘йҖҒиҜҘдҝЎеҸ·зҡ„иҝӣзЁӢзҡ„idзӯүзӯүиҝҷдәӣ
2.1.4 е…ұдә«еҶ…еӯҳ
жҹҘзңӢе…ұдә«еҶ…еӯҳ: ipcs -m
еҲ йҷӨе…ұдә«еҶ…еӯҳ: ipcrm -m е…ұдә«еҶ…еӯҳзҡ„id
SYSTEM-V ipcйҖҡдҝЎж–№ејҸпјҡе…ұдә«еҶ…еӯҳгҖҒдҝЎеҸ·йҮҸгҖҒж¶ҲжҒҜйҳҹеҲ—гҖӮ
1гҖҒе…ұдә«еҶ…еӯҳзү№зӮ№пјҡи·ҹmmapпјҲпјүжҖқжғідёҠжңүдәӣзұ»дјј
еңЁиҝӣзЁӢйҖҡдҝЎж–№ејҸдёӯе…ұдә«еҶ…еӯҳжҳҜж•ҲзҺҮжңҖй«ҳзҡ„пјҢиҝӣзЁӢеҸҜд»ҘзӣҙжҺҘиҜ»еҶҷеҶ…еӯҳпјҢиҖҢдёҚйңҖиҰҒд»»дҪ•ж•°жҚ®зҡ„жӢ·иҙқпјӣ
еҰӮжһңд»Јз ҒдёҚдәәдёәең°еҲ йҷӨе…ұдә«е…ұдә«еҶ…еӯҳпјҢйӮЈд№ҲзЁӢеәҸйҖҖеҮәзҡ„ж—¶еҖҷе®ғиҝҳеңЁпјӣ
еӨҡдёӘиҝӣзЁӢе…ұдә«дёҖж®өеҶ…еӯҳпјҢеӣ жӯӨд№ҹйңҖиҰҒдҫқйқ жҹҗз§ҚеҗҢжӯҘжңәеҲ¶пјҢеҰӮдә’ж–Ҙй”Ғе’ҢдҝЎеҸ·йҮҸзӯү

2гҖҒе…ұдә«еҶ…еӯҳеҜ№еә”зҡ„дёҖзі»еҲ—ж“ҚдҪңеҮҪж•°
пјҲ1пјүеҲӣе»әе…ұдә«еҶ…еӯҳпјҡshmgetпјҲпјү
#include <sys/shm.h>
int shmget(key_t key, size_t size, int shmflg);
иҝ”еӣһеҖјпјҡжҲҗеҠҹвҖ”е…ұдә«еҶ…еӯҳеҜ№иұЎзҡ„midпјҲж ҮиҜҶз¬Ұпјү еҮәй”ҷвҖ”-1
еҸӮж•°пјҡkey----гҖӢеҲӣе»әе…ұдә«еҶ…еӯҳйңҖиҰҒз”ЁеҲ°зҡ„й”®еҖј
size----гҖӢеҶ…еӯҳз©әй—ҙзҡ„еӨ§е°ҸпјҲеӯ—иҠӮпјү
shmflg----гҖӢи®ҫзҪ®еұһжҖ§ IPC_CREAT IPC_EXCL 0666з»„еҗҲ
keyй”®еҖјзҡ„иҺ·еҸ–жңүдёӨз§Қж–№жі•пјҡ
**ж–№жі•дёҖ**пјҡдҪҝз”ЁftokпјҲпјүз”ҹжҲҗй”®еҖј
#include <sys/types.h>
#include <sys/ipc.h>
key_t ftok(const char *pathname, int proj_id);
еҸӮж•°пјҡpathname----гҖӢ и·Ҝеҫ„еҗҚ
proj_id----гҖӢж•ҙж•°
ftok(вҖң.вҖқ , 11) з”ҹжҲҗдёҖдёӘе”ҜдёҖзҡ„keyеҖј
иҝӣзЁӢ1пјҡftok(вҖң.вҖқ , 11) ----гҖӢshmget( 100);.............
иҝӣзЁӢ2пјҡftok(вҖң/home/gecвҖқ , 11) ----гҖӢshmget( 106);
ж— жі•йҖҡдҝЎпјҢиҰҒзЎ®дҝқй”®еҖјдёҖиҮҙжүҚиғҪйҖҡдҝЎ
**ж–№жі•дәҢпјҡ**дёҚдҪҝз”ЁftokпјҲпјүпјҢзЁӢеәҸе‘ҳиҮӘе·ұеҶҷдёӘж•°еӯ—
shmget((key_t)1234, size_t size, int shmflg);
пјҲ2пјү жҳ е°„е…ұдә«еҶ…еӯҳеҲ°з”ЁжҲ·з©әй—ҙ shmatпјҲпјү
#include <sys/shm.h>
void *shmat(int shmid, const void *shmaddr, int shmflg);
иҝ”еӣһеҖјпјҡжҲҗеҠҹвҖ”жҳ е°„еҲ°з”ЁжҲ·з©әй—ҙзҡ„йӮЈзүҮең°еқҖзҡ„йҰ–ең°еқҖ еҮәй”ҷвҖ”-1
еҸӮж•°пјҡshmid ----гҖӢдҪҝз”Ёshmgetзҡ„иҝ”еӣһеҖј
shmaddr----гҖӢдёҖиҲ¬и®ҫзҪ®дёәNULL зі»з»ҹиҮӘеҠЁеҲҶй…Қ
shmflg----гҖӢ SHM_RDONLYпјҡе…ұдә«еҶ…еӯҳеҸӘиҜ»
дёҖиҲ¬и®ҫзҪ®дёә0: е…ұдә«еҶ…еӯҳеҸҜиҜ»еҶҷ
if it is 0 and the calling process has read and write permission, the segment is attached for reading and writing.
пјҲ3пјүи§ЈйҷӨжҳ е°„пјҡshmdtпјҲпјү
#include <sys/shm.h>
int shmdt(const void *shmaddr);
еҸӮж•°пјҡshmaddr----гҖӢ shmatпјҲпјүе…ұдә«еҶ…еӯҳжҳ е°„еҗҺзҡ„ең°еқҖ
иҝ”еӣһеҖјпјҡжҲҗеҠҹвҖ”0 еҮәй”ҷвҖ”-1
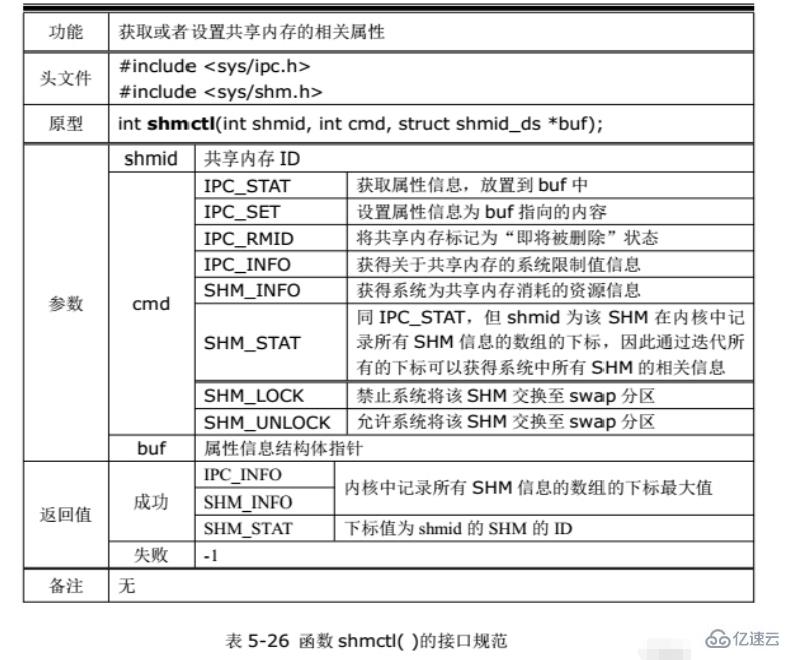
пјҲ4пјүеҲ йҷӨе…ұдә«еҶ…еӯҳпјҡshmctlпјҲпјү
#include <sys/shm.h>
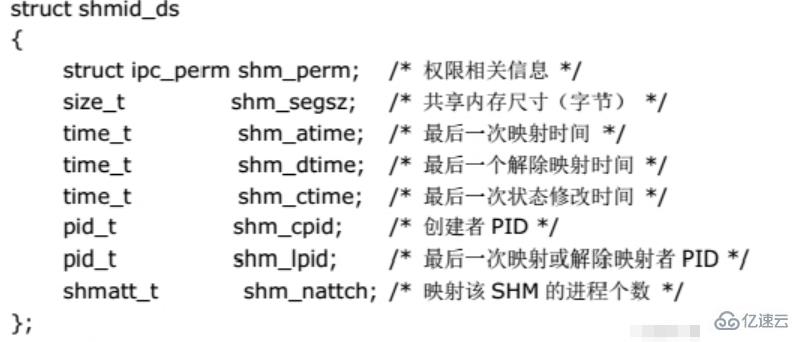
int shmctl(int shmid, int cmd, struct shmid_ds *buf);
еҸӮж•°пјҡ shmid----гҖӢе…ұдә«еҶ…еӯҳзҡ„id
cmd----гҖӢIPC_RMID еҲ йҷӨе…ұдә«еҶ…еӯҳ
IPC_STAT (иҺ·еҸ–еҜ№иұЎеұһжҖ§)
IPC_SET (и®ҫзҪ®еҜ№иұЎеұһжҖ§)
*buf----гҖӢжҢҮе®ҡIPC_STAT/IPC_SETж—¶дҝқеӯҳе…ұдә«еҶ…еӯҳзҡ„зҠ¶жҖҒдҝЎжҒҜ
иҝ”еӣһеҖјпјҡжҲҗеҠҹ еӨұиҙҘвҖ”-1
3гҖҒе…ұдә«еҶ…еӯҳз®ҖеҚ•зӨәдҫӢ
shm_write.c :----------гҖӢ
int main() {
int shmid;
int *p;
// еҲӣе»әе…ұдә«еҶ…еӯҳ
shmid = shmget((key_t)456,1024,IPC_CREAT|IPC_EXCL|0666);
if((shmid == -1)&&(errno == EEXIST)) {
shmid = shmget((key_t)456,1024,0666);
}
// жҳ е°„е…ұдә«еҶ…еӯҳеҲ°иҝӣзЁӢ
p = (int *)shmat(shmid,NULL,0);
*p = 10;
// и§ЈйҷӨжҳ е°„
shmdt(p);
// еҲ йҷӨеҶ…еӯҳ
//shmctl(shmid,IPC_RMID,NULL);
return 0;
}
shm_read.c :----------гҖӢ
int main() {
int shmid;
int *p;
// еҲӣе»әе…ұдә«еҶ…еӯҳ
shmid = shmget((key_t)456,1024,IPC_CREAT|IPC_EXCL|0666);
if((shmid == -1)&&(errno == EEXIST)) {
shmid = shmget((key_t)456,1024,0666);
}
// жҳ е°„е…ұдә«еҶ…еӯҳеҲ°иҝӣзЁӢ
p = (int *)shmat(shmid,NULL,0);
printf("p is :%d\n",*p);
// и§ЈйҷӨжҳ е°„
shmdt(p);
// еҲ йҷӨеҶ…еӯҳ
shmctl(shmid,IPC_RMID,NULL);
return 0;
}
2.1.5ж¶ҲжҒҜйҳҹеҲ—
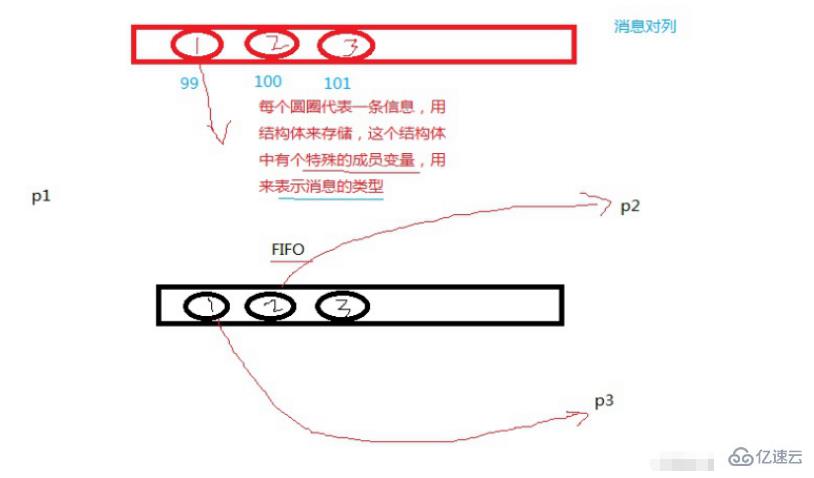
ж¶ҲжҒҜйҳҹеҲ—е°ұжҳҜдёҖдёӘж¶ҲжҒҜзҡ„еҲ—иЎЁгҖӮз”ЁжҲ·еҸҜд»ҘеңЁж¶ҲжҒҜйҳҹеҲ—дёӯж·»еҠ ж¶ҲжҒҜгҖҒиҜ»еҸ–ж¶ҲжҒҜзӯүгҖӮ
ж¶ҲжҒҜйҳҹеҲ—з”ұж¶ҲжҒҜйҳҹеҲ—IDжқҘе”ҜдёҖж ҮиҜҶ
ж¶ҲжҒҜйҳҹеҲ—еҸҜд»ҘжҢүз…§зұ»еһӢжқҘеҸ‘йҖҒ/жҺҘ收ж¶ҲжҒҜ
ж¶ҲжҒҜйҳҹеҲ—зҡ„ж“ҚдҪңеҢ…жӢ¬еҲӣе»әжҲ–жү“ејҖж¶ҲжҒҜйҳҹеҲ—гҖҒж·»еҠ ж¶ҲжҒҜгҖҒиҜ»еҸ–ж¶ҲжҒҜе’ҢжҺ§еҲ¶ж¶ҲжҒҜйҳҹеҲ—
1гҖҒж¶ҲжҒҜйҳҹеҲ—зҡ„зү№зӮ№
еҶҷе…Ҙж¶ҲжҒҜйҳҹеҲ—зҡ„дҝЎжҒҜпјҢеңЁзј–еҶҷзЁӢеәҸзҡ„ж—¶еҖҷдјҡдәәдёәзҡ„еҺ»и®ҫзҪ®ж¶ҲжҒҜзҡ„зұ»еһӢпјҲз”Ёж•ҙж•°жқҘиЎЁзӨәпјүпјҢзӣ®зҡ„жҳҜдёәдәҶе…¶е®ғиҝӣзЁӢеңЁиҜ»еҸ–дҝЎжҒҜзҡ„ж—¶еҖҷиғҪеӨҹеҮҶзЎ®ең°йҖҡиҝҮж¶ҲжҒҜзҡ„зұ»еһӢеҲӨж–ӯиҰҒиҜ»еҸ–зҡ„дҝЎжҒҜгҖӮ
2гҖҒж¶ҲжҒҜйҳҹеҲ—ж“ҚдҪңзҡ„зі»еҲ—еҮҪж•°
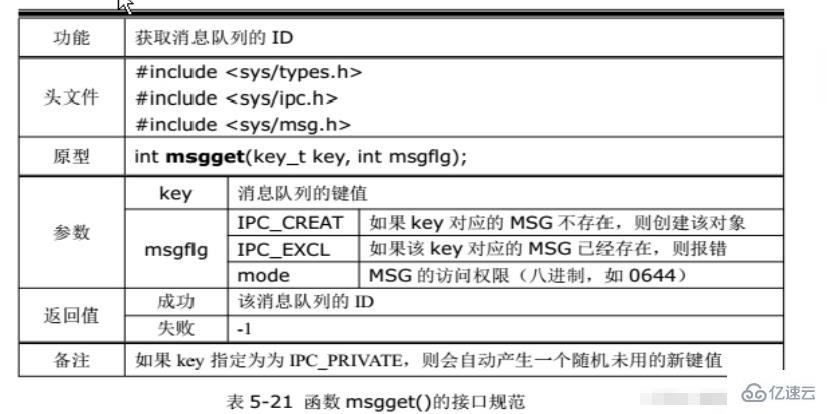
пјҲ1пјүж¶ҲжҒҜйҳҹеҲ—зҡ„еҲӣе»ә msggetпјҲпјү
#include <sys/msg.h>
int msgget(key_t key, int msgflg);
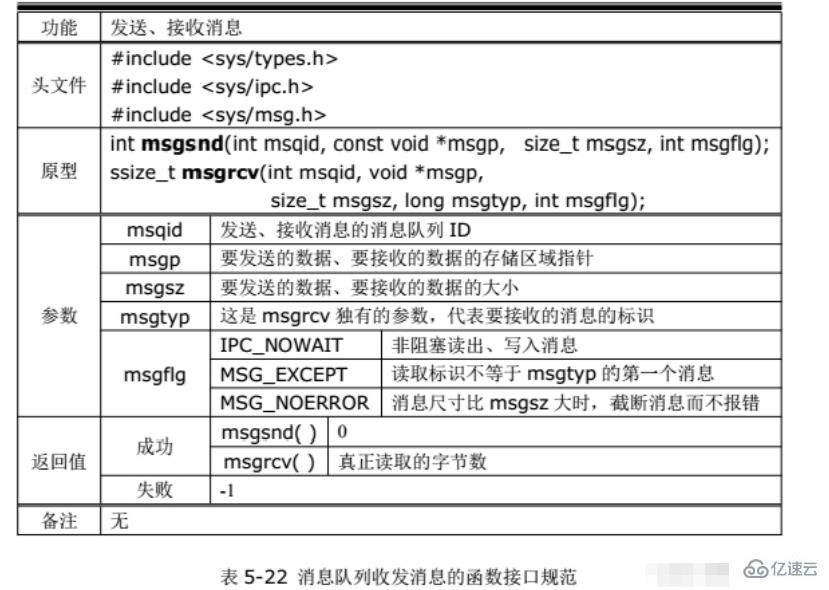
пјҲ2пјүж¶ҲжҒҜйҳҹеҲ—зҡ„收еҸ‘дҝЎжҒҜmsgsndпјҲпјүmsgrcvпјҲпјү
#include <sys/msg.h>
int msgsnd(int msqid, const void *msgp, size_t msgsz, int msgflg);
еҸӮж•°пјҡvoid *msgp ----гҖӢдҪ иҰҒеҸ‘йҖҒдҝЎжҒҜе°ұеӯҳеӮЁеңЁиҝҷдёӘжҢҮй’Ҳдёӯ
еңЁе®һйҷ…зҡ„зј–зЁӢдёӯжҲ‘们йғҪжҳҜе®ҡд№үдёҖдёӘз»“жһ„дҪ“жқҘеӯҳеӮЁдҝЎжҒҜ
struct msgbuf {
long mtype; ----гҖӢж¶ҲжҒҜзҡ„зұ»еһӢ
char mtext[100]; ----гҖӢж¶ҲжҒҜзҡ„еҶ…е®№
}
msgsz ----гҖӢж¶ҲжҒҜзҡ„й•ҝеәҰпјҢеӨ§е°Ҹ
msgflg ----гҖӢи®ҫзҪ®дёә0 йҷӨејҖд»ҘдёҠдёүз§Қе®Ҹе®ҡд№үд№ӢеӨ–зҡ„----йҳ»еЎһиҜ»еҶҷ
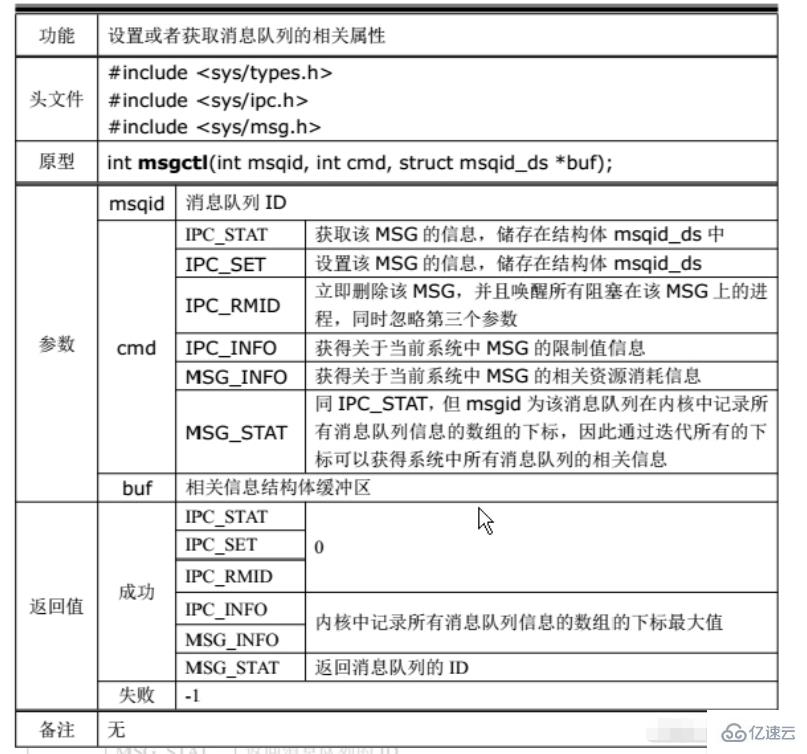
пјҲ3пјүж¶ҲжҒҜйҳҹеҲ—зҡ„еҲ йҷӨ msgctlпјҲпјү
#include <sys/msg.h>
int msgctl(int msqid, int cmd, struct msqid_ds *buf);
3гҖҒж¶ҲжҒҜйҳҹеҲ—йҖҡдҝЎз®ҖеҚ•зӨәдҫӢ
pthread1.c :-----------гҖӢ
#define SIZE 64
//ж•°жҚ®жҺҘ收结жһ„дҪ“
struct msg_rv
{
int mtype;
char msg[50];
};
//ж•°жҚ®еҸ‘йҖҒз»“жһ„дҪ“
struct msg_snd
{
int mtype;
char msg[50];
};
int main(void) {
int msgid;
struct msg_rv data;
struct msg_snd snddata;
char buff[50];
//иҺ·еҸ–msgid
msgid = msgget((key_t)123,IPC_CREAT|0666);
if(msgid == -1) {
printf("msgid failed!\n");
return -1;
}
data.mtype = 88;
snddata.mtype = 89;
while(1) {
bzero(buff,50);
printf("please input data!\n");
fgets(buff,50,stdin);
strcpy(snddata.msg,buff);
if(strncmp(snddata.msg,"end",3)==0) {
break;
}
msgsnd(msgid,(void *)&snddata,strlen(buff)+4,0);//еҫ—еҲ°зҡ„еҖјеҸ‘йҖҒеҮәеҺ»
usleep(20);
printf("run here!\n");
if(msgrcv(msgid,(void *)&data,sizeof(struct msg_rv),data.mtype,0)==-1) {
printf("msgsnd failed!\n");
return -1;
}
printf("receive data:%s\n",data.msg);
if(strncmp(data.msg,"end",3)==0) {
break;
}
}
//ж’Өж¶Ҳж¶ҲжҒҜйҳҹеҲ—
msgctl(msgid,IPC_RMID,0);
return 0;
}
pthread2.c :------------------------гҖӢ
#define SIZE 64
//ж•°жҚ®жҺҘ收结жһ„дҪ“
struct msg_rv
{
int mtype;
char msg[50];
};
//ж•°жҚ®еҸ‘йҖҒз»“жһ„дҪ“
struct msg_snd
{
int mtype;
char msg[50];
};
int main(void)
{
int msgid;
struct msg_rv data;
struct msg_snd snddata;
char buff[50];
data.mtype = 89;
snddata.mtype = 88;
//иҺ·еҸ–msgid
msgid = msgget((key_t)123,IPC_CREAT|0666);
if(msgid == -1) {
printf("msgid failed!\n");
return -1;
}
while(1) {
//жҺҘеҸ—
if(msgrcv(msgid,(void *)&data,sizeof(struct msg_rv),data.mtype,0)==-1)
{
printf("msgsnd failed!\n");
return -1;
}
printf("receive data:%s\n",data.msg);
if(strncmp(data.msg,"end",3)==0) {
break;
}
//еҸ‘йҖҒ
printf("please input data:\n");
bzero(buff,50);
fgets(buff,50,stdin);
strcpy(snddata.msg,buff);
printf("data = %s\n",snddata.msg);
if(strncmp(snddata.msg,"end",3)==0) {
break;
}
msgsnd(msgid,(void *)&snddata,strlen(buff)+4,0);//еҫ—еҲ°зҡ„еҖјеҸ‘йҖҒеҮәеҺ»
printf("run here!\n");
}
//ж’Өж¶Ҳж¶ҲжҒҜйҳҹеҲ—
msgctl(msgid,IPC_RMID,0);
return 0;
}
2.1.6 дҝЎеҸ·йҮҸ
дҝЎеҸ·йҮҸеҚҸи°ғдёҚеҗҢиҝӣзЁӢеҜ№дәҺе…ұдә«иө„жәҗзҡ„и®ҝй—®пјҢе®ғжҳҜдёҚеҗҢиҝӣзЁӢй—ҙжҲ–дёҖдёӘз»ҷе®ҡиҝӣзЁӢеҶ…йғЁдёҚеҗҢзәҝзЁӢй—ҙеҗҢжӯҘзҡ„жңәеҲ¶гҖӮ

1гҖҒдҝЎеҸ·йҮҸжҰӮиҝ°
пјҲ1пјүдәҢеҖјдҝЎеҸ·йҮҸ
еҖјдёә0жҲ–1гҖӮдёҺдә’ж–Ҙй”Ғзұ»дјјпјҢиө„жәҗеҸҜз”Ёж—¶еҖјдёә1пјҢдёҚеҸҜз”Ёж—¶еҖјдёә0
пјҲ2пјүи®Ўж•°дҝЎеҸ·йҮҸ
еҖјеңЁ0еҲ°nд№Ӣй—ҙгҖӮз”ЁжқҘз»ҹи®Ўиө„жәҗпјҢе…¶еҖјд»ЈиЎЁеҸҜз”Ёиө„жәҗж•°
пјҲ3пјүеҜ№дҝЎеҸ·йҮҸзҡ„ж“ҚдҪң
Pж“ҚдҪңпјҡеҚіз”іиҜ·иө„жәҗпјҢдәҰеҚіе°ҶдҝЎеҸ·йҮҸеҖјеҮҸ1пјҢеҸҜиғҪеј•иө·иҝӣзЁӢзқЎзң гҖӮ
Vж“ҚдҪңпјҡеҚійҮҠж”ҫиө„жәҗпјҢдәҰеҚіе°ҶдҝЎеҸ·йҮҸеҖјеҠ 1пјҢVж“ҚдҪңд»ҺдёҚдјҡзқЎзң гҖӮ
зӯү0ж“ҚдҪңпјҡдёҚз”іиҜ·д№ҹдёҚйҮҠж”ҫиө„жәҗпјҢиҖҢжҳҜд»ӨиҝӣзЁӢйҳ»еЎһзӣҙеҲ°дҝЎеҸ·йҮҸзҡ„еҖјдёә0дёәжӯў
2гҖҒдҝЎеҸ·йҮҸзӣёе…ізҡ„жҺҘеҸЈеҮҪж•°
пјҲ1пјү еҲӣе»әдҝЎеҸ·йҮҸйӣҶеҗҲsemgetпјҲпјү
#include <sys/sem.h>
int semget(key_t key, int nsems, int semflg);
еҸӮж•°пјҡkey ----гҖӢй”®еҖј
nsems----гҖӢдҪ еҲӣе»әзҡ„дҝЎеҸ·йҮҸйӣҶдёӯдҝЎеҸ·йҮҸзҡ„дёӘж•°
semflg----гҖӢ IPC_CREAT|0666з»„еҗҲ
иҝ”еӣһеҖјпјҡжҲҗеҠҹвҖ”дҝЎеҸ·йҮҸID
еҮәй”ҷвҖ”-1
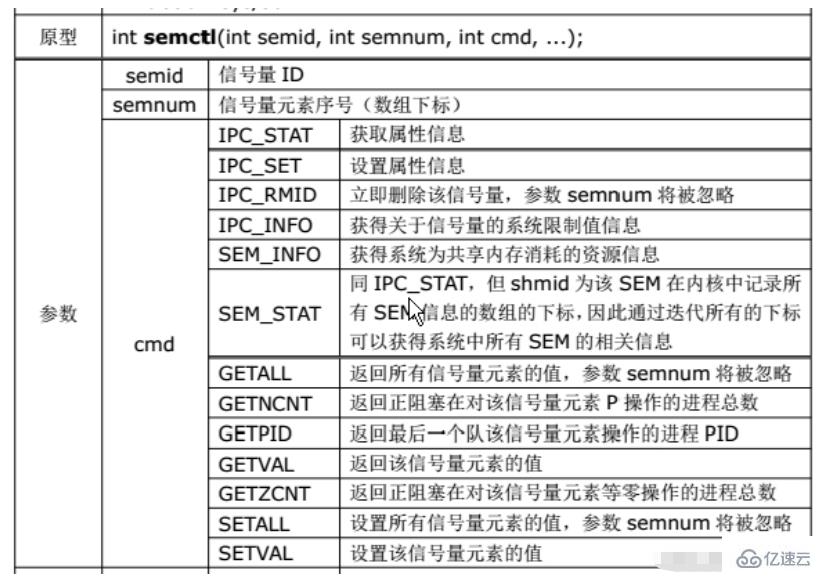
пјҲ2пјүи®ҫзҪ®/еҲ йҷӨдҝЎеҸ·йҮҸйӣҶ semctlпјҲпјү
#include <sys/sem.h>
int semctl(int semid, int semnum, int cmd, ...);
иҝ”еӣһеҖјпјҡжҲҗеҠҹвҖ”0 еӨұиҙҘвҖ”-1
пјҲ3пјүдҝЎеҸ·йҮҸзҡ„PVж“ҚдҪң semopпјҲпјү
ж ёеҝғпјҡдҝЎеҸ·йҮҸдёә <=0 ж—¶иҝӣиЎҢpж“ҚдҪңпјҢдјҡйҳ»еЎһзЁӢеәҸпјҢзӣҙеҲ°еҸҰдёҖиҝӣзЁӢдёӯжҳҜиҜҘдҝЎеҸ·иҝӣиЎҢдәҶvж“ҚдҪңеҗҺпјҢжң¬зЁӢеәҸжүҚдјҡ继з»ӯиҝҗиЎҢ------гҖӢkeyеҖјзӣёеҗҢпјҢдҝЎеҸ·йҮҸе…ұйҖҡ
p еҮҸдёҖж“ҚдҪң
v еҠ дёҖж“ҚдҪң
#include <sys/sem.h>
int semop(int semid, struct sembuf *sops, size_t nsops);
иҝ”еӣһеҖјпјҡжҲҗеҠҹвҖ”0 еҮәй”ҷвҖ”-1
еҸӮж•°пјҡsemid ----гҖӢsemgetзҡ„иҝ”еӣһеҖј
nsops ---гҖӢиҰҒж“ҚдҪңзҡ„дҝЎеҸ·йҮҸзҡ„дёӘж•°(з»“жһ„дҪ“зҡ„дёӘж•°)
sops---гҖӢдҝЎеҸ·йҮҸж“ҚдҪңз»“жһ„дҪ“
struct sembuf {
short sem_num ;=>> иҰҒж“ҚдҪңзҡ„дҝЎеҸ·йҮҸзҡ„зј–еҸ·пјҲж•°з»„дёӢж Үпјү
short sem_op; =>> 0 : зӯүеҫ…пјҢзӣҙеҲ°дҝЎеҸ·йҮҸзҡ„еҖјеҸҳжҲҗ0
1 : йҮҠж”ҫиө„жәҗпјҢVж“ҚдҪң
-1 : еҲҶй…Қиө„жәҗпјҢPж“ҚдҪң
short sem_flg; =>> 0/IPC_NOWAIT/SEM_UNDO
SEM_UNDO: зЁӢеәҸз»“жқҹж—¶(дёҚи®әжӯЈеёёжҲ–дёҚжӯЈеёё)пјҢдҝқиҜҒдҝЎеҸ·еҖјдјҡиў«йҮҚи®ҫдёәsemop()и°ғз”ЁеүҚзҡ„еҖј;
IPC_NOWAIT: еҜ№дҝЎеҸ·зҡ„ж“ҚдҪңдёҚиғҪж»Ўи¶іж—¶пјҢsemop()дёҚдјҡйҳ»еЎһпјҢ并з«ӢеҚіиҝ”еӣһпјҢеҗҢж—¶и®ҫе®ҡй”ҷиҜҜдҝЎжҒҜ;
};
3гҖҒдҝЎеҸ·йҮҸеҚҸеҗҢе…ұдә«еҶ…еӯҳзӨәдҫӢд»Јз Ғ
pthread1.c :-----------гҖӢ
int main()
{
int semid;
int shmid;
char *p;
struct sembuf mysembuf1,mysembuf2;
mysembuf1.sem_num = 0;
mysembuf1.sem_flg = SEM_UNDO;
mysembuf1.sem_op = 1;
mysembuf2.sem_num = 1;
mysembuf2.sem_flg = SEM_UNDO;
mysembuf2.sem_op = -1;
// еҲӣе»әдҝЎеҸ·йҮҸйӣҶеҗҲ
semid = semget((key_t)789,2,IPC_CREAT|0666);
if(semid == -1) {
perror("creat sem failed!\n");
return -1;
}
// еҲӣе»әе…ұдә«еҶ…еӯҳ
shmid = shmget((key_t)456,1024,IPC_CREAT|IPC_EXCL|0666);
if((shmid == -1)&&(errno == EEXIST)) {
shmid = shmget((key_t)456,1024,0666);
}
// жҳ е°„е…ұдә«еҶ…еӯҳеҲ°иҝӣзЁӢ
p = (char *)shmat(shmid,NULL,0);
while(1) {
semop(semid,&mysembuf2,1); // еҜ№дҝЎеҸ·йҮҸ2иҝӣиЎҢpж“ҚдҪңпјҲеҮҸдёҖпјү
printf("the message I recv is:%s\n",p);
printf("please input a message!\n");
scanf("%s",p);
printf("message is %s\n",p);
semop(semid,&mysembuf1,1); // еҜ№дҝЎеҸ·йҮҸ1иҝӣиЎҢvж“ҚдҪңпјҲеҠ дёҖпјү
}
//и§ЈйҷӨжҳ е°„
shmdt(p);
//еҲ йҷӨе…ұдә«еҶ…еӯҳ
shmctl(semid, IPC_RMID, NULL);
}
pthread2.c :-----------гҖӢ
int main() {
int semid;
int shmid;
char *p;
struct sembuf mysembuf1,mysembuf2;
mysembuf1.sem_num = 0; // дҝЎеҸ·йӣҶеҗҲдёӯзҡ„第дёҖдёӘдҝЎеҸ·
mysembuf1.sem_flg = SEM_UNDO;
mysembuf1.sem_op = -1; //pж“ҚдҪң
mysembuf2.sem_num = 1; // дҝЎеҸ·йӣҶеҗҲдёӯзҡ„第дәҢдёӘдҝЎеҸ·
mysembuf2.sem_flg = SEM_UNDO;
mysembuf2.sem_op = 1; // vж“ҚдҪң
// еҲӣе»әдҝЎеҸ·йҮҸйӣҶеҗҲ
semid = semget((key_t)789,2,IPC_CREAT|0666);
if(semid == -1) {
perror("creat sem failed!\n");
return -1;
}
// и®ҫзҪ®дҝЎеҸ·йҮҸзҡ„еҖј
semctl(semid,0,SETVAL,1); //第дёҖдёӘдҝЎеҸ·йҮҸеҲқеҖјдёә1
printf("sem num is:%d\n",semctl(semid,0,GETVAL));
semctl(semid,1,SETVAL,0); //第дәҢдёӘдҝЎеҸ·йҮҸеҲқеҖјдёә0
printf("sem num is:%d\n",semctl(semid,1,GETVAL));
// еҲӣе»әе…ұдә«еҶ…еӯҳ
shmid = shmget((key_t)456,1024,IPC_CREAT|IPC_EXCL|0666);
if((shmid == -1)&&(errno == EEXIST)) {
shmid = shmget((key_t)456,1024,0666);
}
// жҳ е°„е…ұдә«еҶ…еӯҳеҲ°иҝӣзЁӢ
p = (char *)shmat(shmid,NULL,0);
while(1) {
semop(semid,&mysembuf1,1); // еҜ№дҝЎеҸ·йҮҸ1иҝӣиЎҢpж“ҚдҪңпјҲеҮҸдёҖпјүдёҚйҳ»еЎһпјҢеӣ дёәеҲқеҖјдёә1
// жү§иЎҢе®ҢиҝҷеҸҘиҜқд»ҘеҗҺдҝЎеҸ·йҮҸзҡ„еҖје°ұз«Ӣ马еҸҳжҲҗ1
printf("the message I recv is:%s\n",p);
printf("please input a message!\n");
scanf("%s",p);
printf("message is %s\n",p);
semop(semid,&mysembuf2,1); // еҜ№дҝЎеҸ·йҮҸ2иҝӣиЎҢvж“ҚдҪңпјҲеҠ дёҖпјүдёҚйҳ»еЎһпјҢеӣ дёәеҲқеҖјдёә0
}
//и§ЈйҷӨжҳ е°„
shmdt(p);
//еҲ йҷӨе…ұдә«еҶ…еӯҳ
shmctl(semid, IPC_RMID, NULL);
}
2.3 IPC shellе‘Ҫд»Өж“ҚдҪң
ipcs -q жҹҘзңӢж¶ҲжҒҜйҳҹеҲ—
ipcrm -q MSG_ID еҲ йҷӨж¶ҲжҒҜйҳҹеҲ—
ipcs -m жҹҘзңӢе…ұдә«еҶ…еӯҳ
ipcrm -m SHM_ID еҲ йҷӨе…ұдә«еҶ…еӯҳ
ipcs -s жҹҘзңӢдҝЎеҸ·йҮҸ
ipcrm -s SEM_ID еҲ йҷӨдҝЎеҸ·йҮҸ
2.2 иҝӣзЁӢй—ҙйҖҡи®Ҝж–№ејҸжҜ”иҫғ
pipe: е…·жңүдәІзјҳе…ізі»зҡ„иҝӣзЁӢй—ҙпјҢеҚ•е·ҘпјҢж•°жҚ®еңЁеҶ…еӯҳдёӯ
fifo: еҸҜз”ЁдәҺд»»ж„ҸиҝӣзЁӢй—ҙпјҢеҸҢе·ҘпјҢжңүж–Ү件еҗҚпјҢж•°жҚ®еңЁеҶ…еӯҳ
signal: е”ҜдёҖзҡ„ејӮжӯҘйҖҡдҝЎж–№ејҸ
msgпјҡеёёз”ЁдәҺcsжЁЎејҸдёӯпјҢ жҢүж¶ҲжҒҜзұ»еһӢи®ҝй—® пјҢеҸҜжңүдјҳе…Ҳзә§
shmпјҡж•ҲзҺҮжңҖй«ҳ(зӣҙжҺҘи®ҝй—®еҶ…еӯҳ) пјҢйңҖиҰҒеҗҢжӯҘгҖҒдә’ж–ҘжңәеҲ¶
semпјҡй…ҚеҗҲе…ұдә«еҶ…еӯҳдҪҝз”ЁпјҢз”Ёд»Ҙе®һзҺ°еҗҢжӯҘе’Ңдә’ж–Ҙ
д»ҘдёҠе°ұжҳҜе…ідәҺвҖңlinuxеҸҜдёҚеҸҜд»ҘеҲӣе»әеӨҡдёӘиҝӣзЁӢвҖқиҝҷзҜҮж–Үз« зҡ„еҶ…е®№пјҢзӣёдҝЎеӨ§е®¶йғҪжңүдәҶдёҖе®ҡзҡ„дәҶи§ЈпјҢеёҢжңӣе°Ҹзј–еҲҶдә«зҡ„еҶ…е®№еҜ№еӨ§е®¶жңүеё®еҠ©пјҢиӢҘжғідәҶи§ЈжӣҙеӨҡзӣёе…ізҡ„зҹҘиҜҶеҶ…е®№пјҢиҜ·е…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“гҖӮ





