本篇文章给大家分享的是有关ROS2和ROS1启动launch的示例分析,小编觉得挺实用的,因此分享给大家学习,希望大家阅读完这篇文章后可以有所收获,话不多说,跟着小编一起来看看吧。
ros2-launch

通常,学习和使用ROS查阅wiki,如果输入如下网址会有新的收获:
注意区分,docs和wiki的差异。

以Foxy为例,再进一步查阅,可以看到非常好的文档:
新文档中增加了在云端使用ROS2的详细说明!具体自行探索。
讲到这里,我们回到launch。对比一下ROS1和ROS2
roslaunch-noetic
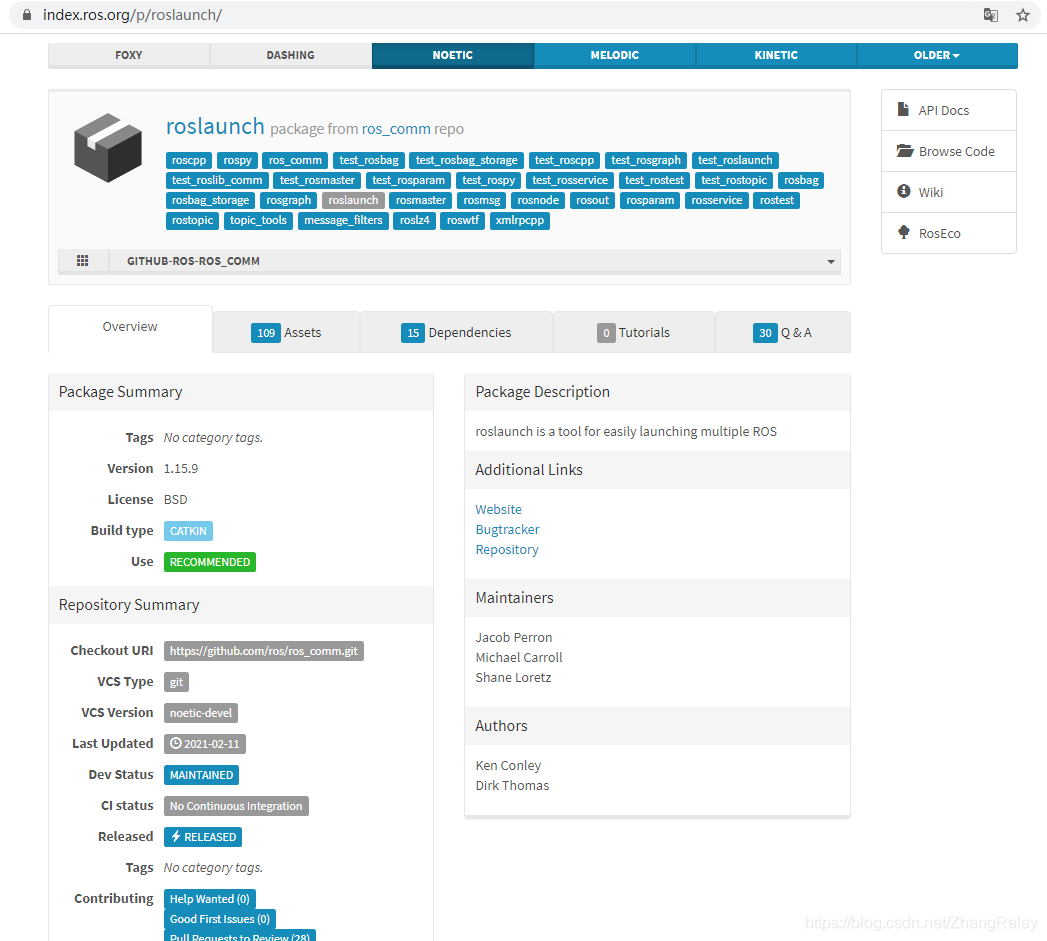
版本1.15.9,可见是稳定的版本,通常版本号>1.0,可以不严谨的认为是相对可靠的版本。
ros2-launch-foxy

版本0.10.4,这种版本号,两个意思,功能还在快速开发迭代中,文档也不完整!
那么怎么办?
如果想掌握好,docs,wiki,code缺一不可!!!
需要阅读ros2 - launch的源代码,这样就能掌握基本的使用,高阶使用自然也轻松,还能自定义launch功能,前提是源码修改!
注意版本号!
以上就是ROS2和ROS1启动launch的示例分析,小编相信有部分知识点可能是我们日常工作会见到或用到的。希望你能通过这篇文章学到更多知识。更多详情敬请关注亿速云行业资讯频道。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





