怎么实现环境建立以及进行建图测试,针对这个问题,这篇文章详细介绍了相对应的分析和解答,希望可以帮助更多想解决这个问题的小伙伴找到更简单易行的方法。
目前机器人使用中需要进行SLAM建图,因为移动机器人想要实现自主行走,核心在于实现自主定位导航,在自主定位导航技术中会涉及到定位、建图、路径规划等问题,而地图构建的好坏将直接影响机器人的行走路径。机器人想要到达某个目的地,需要和人类绘制地图一样,描述环境、认识环境的过程主要就是依靠地图。
而目前建图方式有激光雷达、视觉建图、还有深度学习等。今天介绍的cartographer就属于激光slam。主流的激光SLAM算法有hector、gmapping、karto、cartographer等。
下面简单的介绍几种SLAM算法:
1. hector是一种结合了鲁棒性较好的扫描匹方法2D_SLAM方法和使用惯性传感系统的导航技术。传感器的要求较高,高更新频率小测量噪声的激光扫描仪,不需要里程计。使空中无人机与地面小车在不平坦区域运行存在运用的可能性。作者利用现代激光雷达的高更新率和低距离测量噪声,通过扫描匹配实时地对机器人运动进行估计。所以当只有低更新率的激光传感器时,即便测距估计很精确,对该系统都会出现一定的问题。
hector基于优化的算法(解最小二乘问题),优缺点:不需要里程计,但对于雷达帧率要求很高40Hz,估计6自由度位姿,可以适应空中或者地面不平坦的情况。初值的选择对结果影响很大,所以要求雷达帧率较高。
2. gmapping是一种基于粒子滤波的激光SLAM算法,它已经集成在ROS中,是移动机器人中使用最多的SLAM算法。基于粒子滤波的算法用许多加权粒子表示路径的后验概率,每个粒子都给出一个重要性因子。但是,它们通常需要大量的粒子才能获得比较好的的结果,从而增加该算法的的计算复杂性。此外,与PF重采样过程相关的粒子退化耗尽问题也降低了算法的准确性。
缺点:严重依赖里程计,无法适应无人机及地面不平坦的区域,无回环(激光SLAM很难做回环检测),大的场景,粒子较多的情况下,特别消耗资源。
3. karto是基于图优化的SLAM算法,用高度优化和非迭代cholesky矩阵进行稀疏系统解耦作为解。图优化方法利用图的均值表示地图,每个节点表示机器人轨迹的一个位置点和传感器测量数据集,箭头的指向的连接表示连续机器人位置点的运动,每个新节点加入,地图就会依据空间中的节点箭头的约束进行计算更新。路标landmark越多,内存需求越大,然而图优化方式相比其他方法在大环境下制图优势更大。
karto采取的是spa(karto_slam)或g2o(nav2d), karto的前端与后端采取的是单线程进行。
4.LagoSLAM 是线性近似图优化,不需要初始假设。基本的图优化slam的方法就是利用最小化非线性非凸代价函数.每次迭代, 解决局部凸近似的初始问题来更新图配置,过程迭代一定次数直到局部最小代价函数达到. (假设起始点经过多次迭代使得局部代价函数最小). 。假设图中每个节点的相对位置和方向都是独立的,作者求解了一个等价于非凸代价函数的方程组。为此,提出了一套基于图论的程序,通过线性定位和线性位置估计,得到非线性系统的一阶近似。
5. cartographer是google开发的实时室内SLAM项目,cartographer采用基于google自家开发的ceres非线性优化的方法,cartographer的亮点在于代码规范与工程化,非常适合于商业应用和再开发。并且cartographer基于submap子图构建全局地图的思想,能有效的避免建图过程中环境中移动物体的干扰。并且cartographer支持多传感器数据(odometry、IMU、LaserScan等)建图,支持2D_SLAM和3D_SLAM建图。
能天然的输出协方差矩阵,后端优化的输入项。成本较低的雷达也能跑出不错的效果。cartographer是google推出的一套基于图优化的SLAM算法。
cartographer算法并没有给人惊艳的感觉,但该算法的主要目标是实现低计算资源消耗,达到实时SLAM的目的,所以很适合嵌入式端的使用。
这篇文章是介绍cartographer在linuxPC环境(Ubuntu16)下进行源码下载进行demo测试的教程,本文的前提条件是你的电脑里已经安装了ROS以下版本的任意一个:Noetic、Kinetic、Melodic。

算法分析
该算法主要分为两个部分,第一个部分称为Local SLAM, 该部分通过一帧帧的Laser Scan建立并维护一系列的Submap,而所谓的submap就是一系列的Grid Map。当再有新的Laser Scan中会通过Ceres Scan Matching的方法将其插入到子图中的最佳位置。但是submap会产生误差累积的问题,因此,算法的第二个部分,称为Global SLAM的部分,就是通过Loop Closure来进行闭环检测,来消除累积误差:当一个submap构建完成,也就是不会再有新的laser scan插入到该submap时,算法会将该submap加入到闭环检测中。闭环检测的本质也是一个优化问题,该优化问题被表达成了一个pixel-accurate match的形式,解决优化问题的方法是Branch-and-Bound Approach.

作者:良知犹存
转载授权以及围观:欢迎添加微信公众号:羽林君
安装介绍
cartographer的安装主要包括三个部分:cartographer、cartographer-ros、ceres-solver。其中cartographer 是计算的部分,cartographer-ros是算法在ROS中通讯交互数据的部分,ceres-solver谷歌开发的一款用于非线性优化的库,在谷歌的开源激光雷达slam项目cartographer中被大量使用。
安装的方法有两种,一种是官网的集成式下载配置,一种是把cartographer需要的依赖部分分别安装配置。
两种方式区别就在于,第一种虽然方便,但是由于网络问题(你懂的)所以Google的相关文件下载会失败,所以就出现了,把依赖单独下载编译,最后下载cartographer进行编译。
官网方式:
1. 安装 wstool下载工具、rosdep和ninja编译工具(ninja是一个新型的编译小工具,用来替换复杂的make,从而实现快速编译)
sudo apt-get updatesudo apt-get install -y python-wstool python-rosdep ninja-build
2. 建立一个wstool下载+ROS基本编译的二合一环境
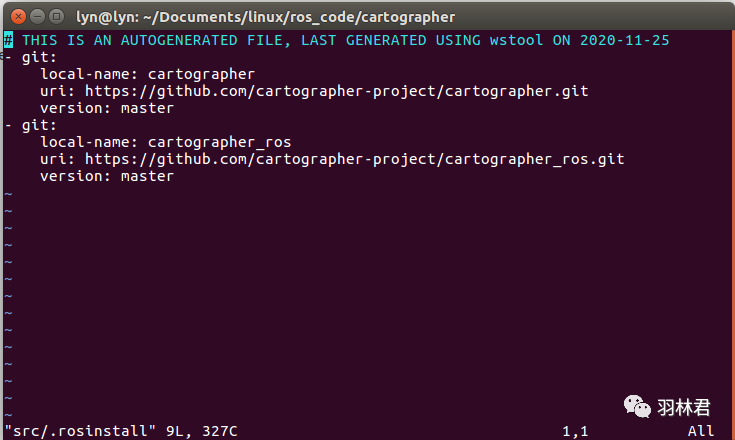
mkdir catkin_wscd catkin_wswstool init srcwstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartographer_ros.rosinstall
这是 wstool 命令生成 .rosinstall 的文件里面的内容,可以看到设置了cartographer、cartographer-ros下载链接。
wstool update -t src
静静等待下载,速度就取决你对于Google的认知。
3.安装proto3.
Protocol Buffers(简称Protobuf) ,是Google出品的序列化框架,与开发语言无关,和平台无关,具有良好的可扩展性。Protobuf和所有的序列化框架一样,都可以用于数据存储、通讯协议。
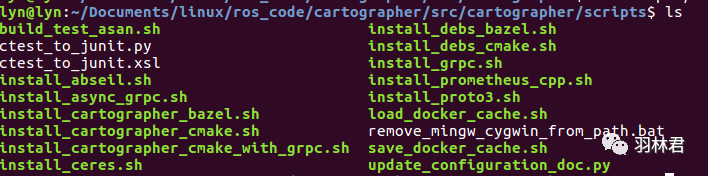
src/cartographer/scripts/install_proto3.sh
此外其实除了Protobuf我们还可以配置其他依赖,这些脚本都在这个目录,如果编译过程中遇到依赖问题就可以去利用脚本去下载。
4.rosdep init在安装ROS时候就安装过了,不过这个经常会出现问题,我之前写过一篇ROS安装的文件,大家有兴趣可以去看看
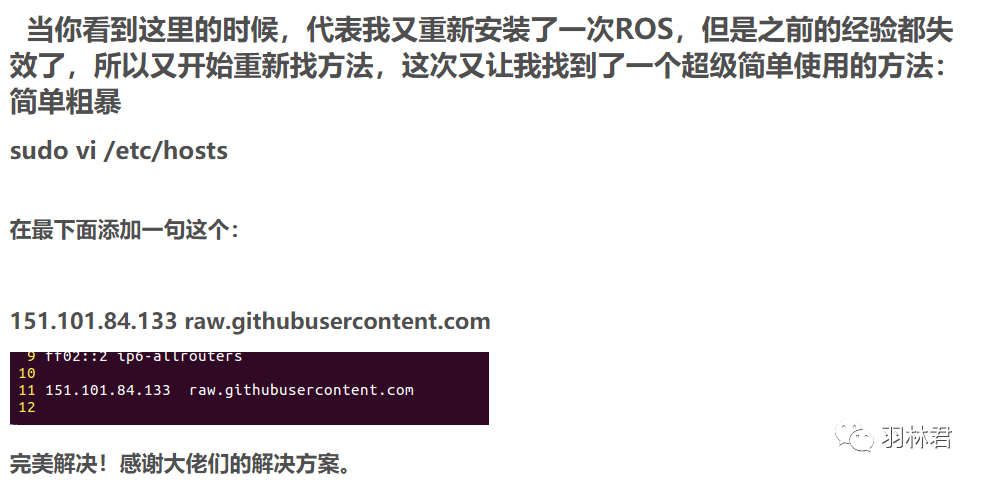
对于这个问题,有两种解决思路:访问DNS解析环节解决或者直接切换软件源。
DNS解析环节解决:
切换linux软件源:

sudo rosdep initrosdep updaterosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
5.最后一步编译
catkin_make_isolated --install --use-ninjasource install_isolated/setup.bash
但是好多时候因为下载问题,就会出现这样那样的问题,所以就出现了下面的方法,把包单独下载,然后再进行编译安装。
注!:在我编译cartographer过程中,和文章所写这种一气呵成的感觉恰恰相反,我编译了好多次才编译成功的,而且中间出现各种编译问题,基本都是版本问题。所以请大家注意下载各个分包的版本,切记,切记,切记~
你看我probuf版本下载记录就知道了。

分包编译方式:
cartographer分成6个部分,分别是eigen3.2.9,ceres1.13.0,protobuf大于3.0.0,cartographer,cartogpher_ros,abseil。分开进行编译:
1.eigen
Eigen是高级 C ++ 模板标头库,用于线性代数,矩阵和矢量运算,几何变换,数值求解器和相关算法。自3.1.1版以来,Eigen是根据Mozilla Public License 2.0许可的开源软件。早期版本是根据GNU较宽松通用公共许可证授权的。
注意警告:cartographer对eigen,ceres,protobuf有严格的版本限制,版本必须严格!!!
#选择版本3.2.9git clone https://gitlab.com/libeigen/eigen.gitmkdir buildcd buildcmake ..sudo make install
安装完成
2.ceres
Ceres solver 是谷歌开发的一款用于非线性优化的库,在谷歌的开源激光雷达slam项目cartographer中被大量使用。
注意:ceres版本必须是1.13.0,其它版本与eigen3.2.9不匹配
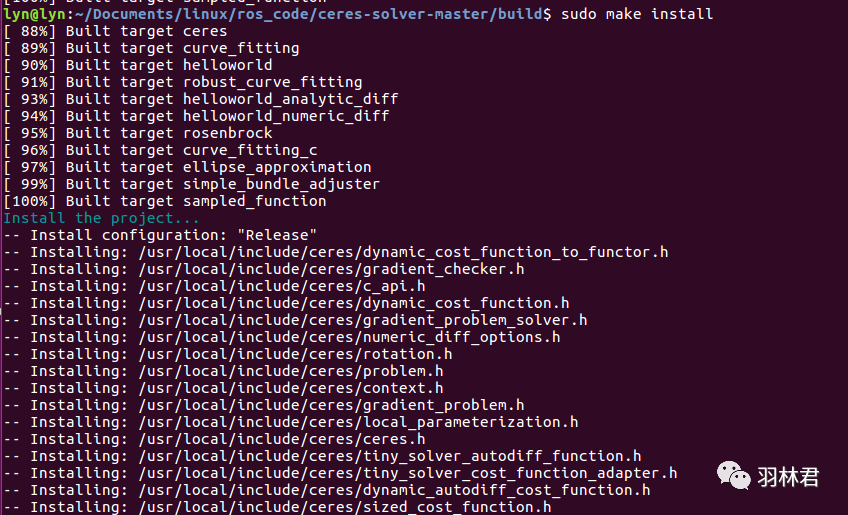
#选择版本1.13.0git clone https://github.com/ceres-solver/ceres-solver.gitmkdir buildcd buildcmake ..make -j8sudo make install
编译过程中如果出现这个编译问题:
Failed to find glog
-- Failed to find installed glog CMake configuration, searching for glog build directories exported with CMake.
-- Failed to find an installed/exported CMake configuration for glog, will perform search for installed glog components.
-- Failed to find glog - Could not find glog include directory, set GLOG_INCLUDE_DIR to directory containing glog/logging.h
这个原因是缺失glog库(glog 是一个 C++ 日志库,它提供 C++ 流式风格的 API。在安装 glog 之前需要先安装 gflags,这样 glog 就可以使用 gflags 去解析命令行参数),我们可以用apt-get install安装,也可以下载源码进行编译安装.
apt-get install安装:
sudo apt-get install libgoogle-glog-dev
下载源码进行编译安装:
git clone https://github.com/google/glog.gitcd glogmkdir buildcmake ..makesudo make install
再重新进行cere编译安装,又通过一关
3. protobuf
Protocol Buffers(简称Protobuf) ,是Google出品的序列化框架,与开发语言无关,和平台无关,具有良好的可扩展性。Protobuf和所有的序列化框架一样,都可以用于数据存储、通讯协议。
注意:protobuf安装方式特殊,脚本安装
选择版本3.0.0git clone https://github.com/protocolbuffers/protobuf.git./autogen.sh
这次也会遇到error问题,
第一个error 48: autoreconf: not found
是在不同版本的 tslib 下执行 autogen.sh 产生。它们产生的原因一样,是因为没有安装automake 工具, 用下面的命令安装好就可以了。
sudo apt-get install autoconf automake libtool
第二个error可能是下载问题,这边会提示你下载失败,你可以选择注释掉,或者使用我提供的第二种编译方法:
#如遇见Error,prot:443,注释autogen.sh脚本34行./configuremake -j8sudo make installsudo ldconfig#测试一下protobufprotoc --version#不出意外将会显示libprotoc 3.0.0
第二种编译方法:
上文说到,我们在cartographer/scripts目录下可以找到cartographer依赖文件的下载的脚本,这些的脚本里面还有编译的选项,这时候我们就可以看下install_proto3.sh 这个文件,里面可以看到如下内容:
mkdir buildcd buildcmake -G Ninja \ -DCMAKE_POSITION_INDEPENDENT_CODE=ON \ -DCMAKE_BUILD_TYPE=Release \ -Dprotobuf_BUILD_TESTS=OFF \ ../cmakeninjasudo ninja install
我们直接复制直接编译即可。
4.abseil
abseil 是 google 开源的 C++通用库,其目标是作为标准库的补充。abseil 不但提供了标准库没有但很常用的功能,也对标准库的一些功能进行了增强设计,使用 abseil 库能使程序性能和开发效率都取得不错的提升。
cartographer对abseil没有版本要求,但是一定要有。
git clone https://github.com/abseil/abseil-cpp.gitmkdir buildcd buildcmake .. -DCMAKE_CXX_STANDARD=11make -j8sudo make install
不过在后续编译abseil,大家可能会遇到这个问题
CMake Error at CMakeLists.txt:49 (find_package):
By not providing "FindAbseil.cmake" in CMAKE_MODULE_PATH this project has
asked CMake to find a package configuration file provided by "Abseil", but
CMake did not find one.
Could not find a package configuration file provided by "Abseil" with any
of the following names:
AbseilConfig.cmake
abseil-config.cmake
Add the installation prefix of "Abseil" to CMAKE_PREFIX_PATH or set
"Abseil_DIR" to a directory containing one of the above files. If "Abseil"
provides a separate development package or SDK, be sure it has been
installed.

不过没事,是因为CMakeLists.txt在进行搜寻absil中,定义的名称和你编译abseil名称不同,CMakeLists.txt是大写的,而实际你编译安装后的包名称为小写。

修改如上所示:Abseil 修改为 absl
5.carographer
注意:carographer和cartographer _ros版本必须对应
mkdir cartographercd cartographer & mkdir srccd srcgit clone https://github.com/cartographer-project/cartographer.gitgit clone https://github.com/cartographer-project/cartographer_ros.gitcatkin_make_isolated /*也可以用*/ catkin_make_isolated --install --use-ninja
编译成功:
建图开发
现在安装了Cartographer和Cartographer的ROS集成,官方也提供了一些数据集,Deutsches Museum(德意志博物馆),这样我就可以很方便测试Cartographer生成地图和其他的功能了。
下载示例包(例如德意志博物馆的2D和3D背包系列)到一个已知的位置
示例位于~/Downloads,并使用roslaunch来调出演示:
# Download the 2D backpack example bag.wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag# Launch the 2D backpack demo.roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag# Download the 3D backpack example bag.wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/with_intensities/b3-2016-04-05-14-14-00.bag# Launch the 3D backpack demo.roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/b3-2016-04-05-14-14-00.bag
又会是下载的问题,这些文件又大,下载速度又慢还经常失败,我也是废了九牛二虎之力下载下来的。
为了方便大家测试,大家可以公众号后台私我,或者添加我微信号,我把我下载好的文件发给大家。
截图有限,之前操作都忘记截图了,导致现在就只有一个了,大家凑合看了哈。
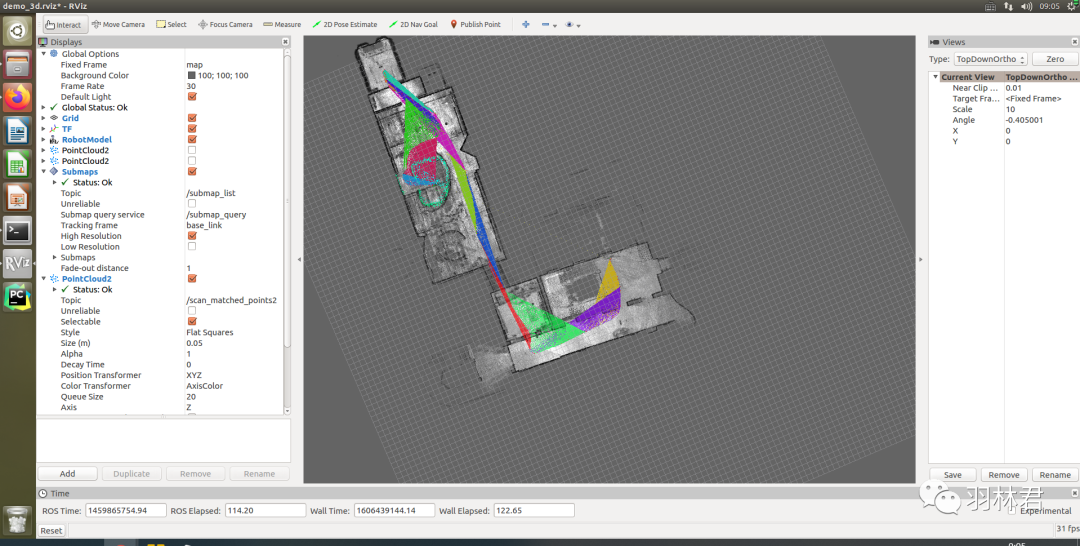
生成.pdstream地图(等待直到cartographer_offline_node完成),
roslaunch cartographer_ros offline_backpack_2d.launch bag_filenames:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
然后运行纯定位:
roslaunch cartographer_ros demo_backpack_2d_localization.launch load_state_filename:=${HOME}/Download/cartographer_paper_deutsches_museum.bag.pbstream bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag关于怎么实现环境建立以及进行建图测试问题的解答就分享到这里了,希望以上内容可以对大家有一定的帮助,如果你还有很多疑惑没有解开,可以关注亿速云行业资讯频道了解更多相关知识。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





