本篇文章为大家展示了怎么远程调试在Linux车机中的应用,内容简明扼要并且容易理解,绝对能使你眼前一亮,通过这篇文章的详细介绍希望你能有所收获。
导读
在软件开发过程中,调试是必不可少的环节,嵌入式操作系统的调试与桌面操作系统的调试相比有很大差别,嵌入式系统的可视化调试能力比桌面操作系统要弱一点。对于导航这种业务场景比较复杂的程序开发,可视化调试环境能让我们业务场景开发事半功倍,也能快速定位导航业务与车机中其他模块交互出现的问题,提高开发过程中的调试效率。
远程调试是真机调试中最便捷的一种,开发者只需借用在PC端强大的调试器就能完成业务场景的调试。
背景
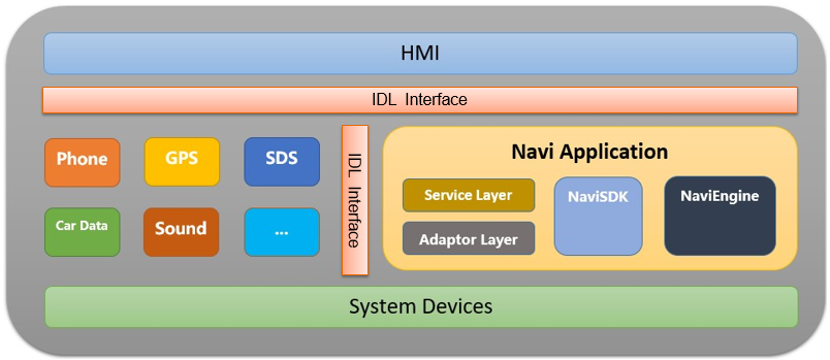
Thrift是一种接口描述语言和二进制通讯协议,它被用来定义和创建跨语言的服务,是一种RPC(远程过程调用)通信框架,由Facebook为“大规模跨语言服务开发”。在车机系统中,各模块之间也可以使用Thrift通信框架进行通信。导航作为一个单独的为进程提供服务的模块,只提供导航相关的业务以及地图渲染的能力,导航的HMI界面是车机系统中统一的操作界面,系统HMI界面与导航之间的交互接口则是通过已经定义好的接口描述语言(IDL),使用自动化工具生成本地可调用的接口,然后使用Thrift框架传输完成系统HMI与导航之间的通信。
调试手段
为了开发过程中调试方便,我们在PC上做了一套模拟器,能在PC上进行地图渲染。还实现了一套在PC上使用的系统HMI模拟命令发送工具,模拟工具是作为客户端连接导航提供的服务,这样能在PC端模拟发送命令,帮助导航简单业务的开发,但这种方式存在着以下弊端:
模拟命令工具,只能模拟简单的业务场景,有多个交互的场景无法模拟。
无法操作地图HMI,也看不到HMI界面显示以及过程中的反馈。
无法滚动地图,后面接了Win32上面的鼠标事件,能用鼠标实现滚动,但这种方式与车机中滚动流程不一致。
PC端无法使用车机中的设备,如导航过程中没有导航音,无法使用USB等。
PC端拿不到车机中的数据,比如车身数据、GPS信号等。
调试方案优化
针对当前调试手段存在的以上问题。我们对调试方案进行了优化,我们可以借助车机中系统HMI来与导航进行交互。实现了使用车机环境中的信号对PC端导航业务场景进行调试。主要有以下几点功能:
1.PC端模拟器接收车机发来的信号
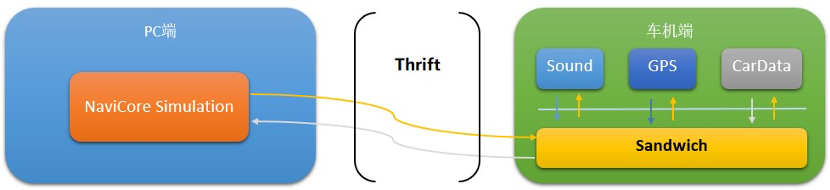
在该项目中,导航的相关业务都是作为服务端向车机中其他模块提供服务,在车机系统中,系统HMI连接导航服务的地址是固定的,我们在车机中开发了一个代理--Sandwich,主要作用是启动导航服务,这个导航服务并不实现真正的导航业务,而是启动了一个空服务,让车机中其他模块能成功建立连接,同时Sandwich作为客户端连接PC端模拟器提供的导航服务,PC端的导航服务真正实现导航业务,Sandwich负责接收车机发送过来的业务请求,并将请求转发给PC端模拟器,这样PC端模拟器就能接收到车机中的信号,收到的业务请求并做处理再将处理结果通过Thrift反馈到车机端。
这个流程我们打通了车机中信号发送到PC端模拟器,并可以将处理完的数据反馈给车机端。
3. 将PC端模拟器中显示的地图投射到车机端显示
实现了以上两步,一个使用车机信号调试PC端导航程序的环境基本完成了。已经能实现车机信号与PC进行双向接收,但是此时导航的渲染能力还是停留在PC端,车机中还只是显示了一个系统HMI界面,无法看到导航地图展现的效果,这样就会带来一个问题,一些需要强依赖地图的操作可能就无法精准操作,比如点击地图上某个POI等。此时需要将PC端的展现同步到车机侧。
要实现这一目的,一般我们有两种方法:
车机与PC同步渲染
车机中的导航正常运行,当导航接收到系统模块业务请求时,先是车机导航进行处理,处理完毕后将信号转发到PC端处理,这种方案两端导航业务逻辑并行运行,复杂的业务场景下,两端会同时跟车机进行交互,此时可能会产生互斥,会有两端逻辑不同步的场景,达不到预期效果。
将车机中渲染的数据投射到车机端
在这里我们可以将PC上程序每渲染一帧地图则将结果传到车机端,由车机端Sandwich负责接收,当Sandwich接收到一帧地图像素数据后,负责将此帧数据渲染到车机屏幕上,此时车机中呈现的效果跟PC端一致。在该项目中我们采用了这一方案,这种方案中,真正的导航业务逻辑是来自PC端,车机中只是一个转发过程,所以不会存在第一种方案中的问题。
但在某些特定的环境下,导航描画会很频繁,发送给车机的数据也会很多,频繁的数据发送可能会带来一定的性能开销,表现上可能会出现延迟。这里可以使用降低图像质量来减少图像数据,例如,可以使用16位或者8位BMP来传输,还可以压缩传输,这样1920*720分辨率图像传输大小能控制在30-50k左右。
小结
基于车机系统中Thrift通信框架,实现的这套远程调试方案,实质是在车机中使用Sandwich程序接管车机系统中与导航有交互的全部接口处理,通过RPC通信转发,实现了使用真实车机信号调试导航的目的。有了这套调试环境,我们甚至可以直接在真车上边路测边调试,跟以前的路测拿Log回来分析、重现相比,整个调试过程,简单,便捷,直观。大大提高了开发效率。
基于RPC通信的特性,我们还可以对调试方案再进一步优化,可以加入多客户端调试功能,使用同一台车机环境,不同的模块负责人可以同时进行复杂业务场景的联合调试。
上述内容就是怎么远程调试在Linux车机中的应用,你们学到知识或技能了吗?如果还想学到更多技能或者丰富自己的知识储备,欢迎关注亿速云行业资讯频道。
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。
原文链接:https://my.oschina.net/amaptech/blog/4533551



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



