еҰӮдҪ•иҝӣиЎҢPlanning жЁЎеқ—жәҗд»Јз ҒеҲҶжһҗ
жң¬зҜҮж–Үз« з»ҷеӨ§е®¶еҲҶдә«зҡ„жҳҜжңүе…іеҰӮдҪ•иҝӣиЎҢPlanning жЁЎеқ—жәҗд»Јз ҒеҲҶжһҗпјҢе°Ҹзј–и§үеҫ—жҢәе®һз”Ёзҡ„пјҢеӣ жӯӨеҲҶдә«з»ҷеӨ§е®¶еӯҰд№ пјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« еҗҺеҸҜд»ҘжңүжүҖ收иҺ·пјҢиҜқдёҚеӨҡиҜҙпјҢи·ҹзқҖе°Ҹзј–дёҖиө·жқҘзңӢзңӢеҗ§гҖӮ
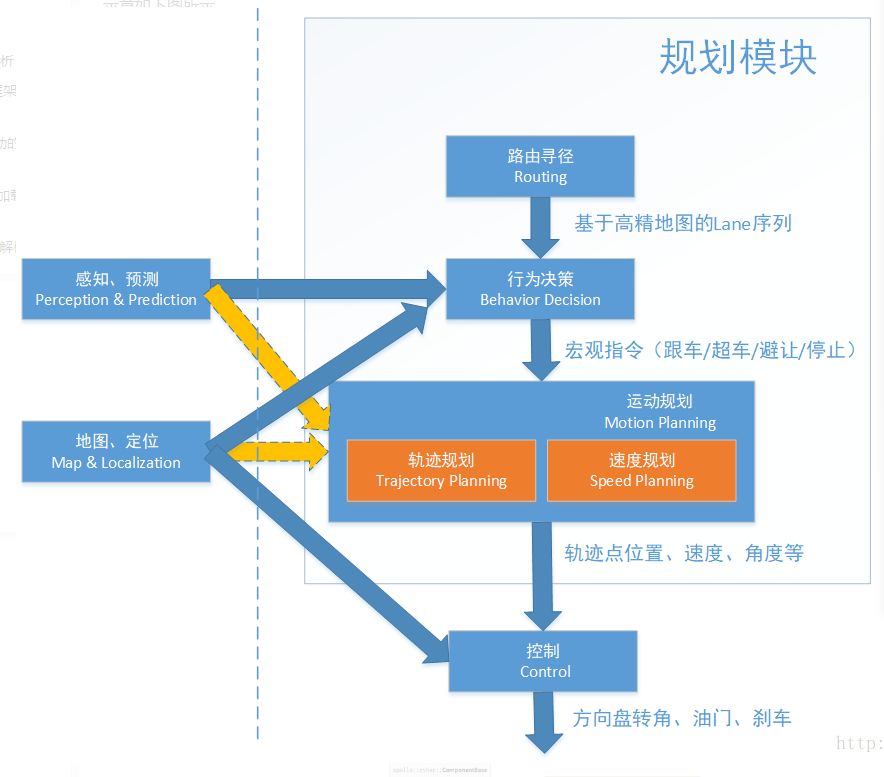
规еҲ’пјҲPlanningпјүжЁЎеқ—дҪҚдәҺе‘ҪеҗҚз©әй—ҙпјҡapollo::planningпјҢе…¶дҪңз”ЁеңЁдәҺжһ„е»әж— дәәиҪҰд»Һиө·зӮ№еҲ°з»ҲзӮ№зҡ„еұҖйғЁиЎҢ驶и·Ҝеҫ„пјҢе…·дҪ“иҖҢиЁҖпјҢе°ұжҳҜз»ҷе®ҡеҜјиҲӘең°еӣҫгҖҒеҜјиҲӘи·Ҝеҫ„гҖҒеҪ“еүҚе®ҡдҪҚзӮ№гҖҒиҪҰиҫҶзҠ¶жҖҒгҖҒ е‘Ёиҫ№зӣ®ж Үзҡ„ж„ҹзҹҘеҸҠйў„жөӢдҝЎжҒҜпјҢ规еҲ’жЁЎеқ—и®Ўз®—еҮәеҸҜдҫӣжҺ§еҲ¶жЁЎеқ—жү§иЎҢзҡ„дёҖжқЎе®үе…Ёдё”иҲ’йҖӮзҡ„иЎҢ驶и·Ҝеҫ„гҖӮ
规еҲ’жЁЎеқ—иҫ“еҮәзҡ„и·Ҝеҫ„жҳҜеұҖйғЁи·Ҝеҫ„иҖҢйқһе…ЁеұҖи·Ҝеҫ„гҖӮдёҫдҫӢпјҢеҰӮж— дәәиҪҰйңҖд»Һй•ҝжІҷжҷәиғҪй©ҫй©¶з ”з©¶йҷўиЎҢ驶иҮій•ҝжІҷй«ҳй“ҒеҚ—з«ҷпјҢйҰ–е…ҲйңҖеҖҹеҠ©RoutingжЁЎеқ—иҫ“еҮәе…ЁеұҖеҜјиҲӘи·Ҝеҫ„пјҢжҺҘдёӢжқҘжүҚжҳҜ规еҲ’жЁЎеқ—еҹәдәҺе…ЁеұҖеҜјиҲӘи·Ҝеҫ„иҝӣиЎҢдёҖе°Ҹж®өгҖҒдёҖе°Ҹж®өе…·дҪ“иЎҢ驶и·Ҝеҫ„зҡ„规еҲ’гҖӮ
规еҲ’жЁЎеқ—зҡ„дҪңз”ЁжҳҜж №жҚ®ж„ҹзҹҘйў„жөӢзҡ„з»“жһңпјҢеҪ“еүҚзҡ„иҪҰиҫҶдҝЎжҒҜе’Ңи·ҜеҶө规еҲ’еҮәдёҖжқЎиҪҰиҫҶиғҪеӨҹиЎҢ驶зҡ„иҪЁиҝ№пјҢиҝҷдёӘиҪЁиҝ№дјҡдәӨз»ҷжҺ§еҲ¶жЁЎеқ—пјҢжҺ§еҲ¶жЁЎеқ—йҖҡиҝҮжІ№й—ЁпјҢеҲ№иҪҰе’Ңж–№еҗ‘зӣҳдҪҝеҫ—иҪҰиҫҶжҢү照规еҲ’зҡ„иҪЁиҝ№иҝҗиЎҢгҖӮ
еүҚиЁҖ
规еҲ’жЁЎеқ—зҡ„иҪЁиҝ№жҳҜзҹӯжңҹиҪЁиҝ№пјҢеҚіиҪҰиҫҶзҹӯжңҹеҶ…иЎҢ驶зҡ„иҪЁиҝ№пјҢй•ҝжңҹиҪЁиҝ№жҳҜRoutingжЁЎеқ—规еҲ’еҮәзҡ„еҜјиҲӘиҪЁиҝ№пјҢеҚіиө·зӮ№еҲ°зӣ®зҡ„ең°зҡ„иҪЁиҝ№пјҢ规еҲ’жЁЎеқ—дјҡе…Ҳз”ҹжҲҗеҜјиҲӘиҪЁиҝ№пјҢ然еҗҺж №жҚ®еҜјиҲӘиҪЁиҝ№е’Ңи·ҜеҶөзҡ„жғ…еҶөпјҢжІҝзқҖзҹӯжңҹиҪЁиҝ№иЎҢ驶пјҢзӣҙеҲ°зӣ®зҡ„ең°гҖӮ
规еҲ’жЁЎеқ—еҶ…йғЁз»“жһ„еҸҠе…¶дёҺе…¶д»–жЁЎеқ—зҡ„дәӨдә’зӨәж„ҸеҰӮдёӢеӣҫжүҖзӨәгҖӮ
жЁЎеқ—дё»е…ҘеҸЈ
ж №жҚ®еҗ„еҠҹиғҪжЁЎеқ—зҡ„еҗҜеҠЁиҝҮзЁӢзҡ„еҲҶжһҗпјҢPlanningжЁЎеқ—зҡ„дё»е…ҘеҸЈдёәпјҡ
int main(int argc, char** argv) {
2 google::SetUsageMessage("we use this program to load dag and run user apps.");
3
4 // parse the argument
5 ModuleArgument module_args;
6 module_args.ParseArgument(argc, argv);
7
8 // initialize cyber
9 apollo::cyber::Init(argv[0]);
10
11 // start module
12 ModuleController controller(module_args);
13 if (!controller.Init()) {
14 controller.Clear();
15 AERROR << "module start error.";
16 return -1;
17 }
18
19 apollo::cyber::WaitForShutdown();
20 controller.Clear();
21 AINFO << "exit mainboard.";
22
23 return 0;
24}MainеҮҪж•°еҚҒеҲҶз®ҖеҚ•пјҢйҰ–е…ҲжҳҜи§ЈжһҗеҸӮж•°пјҢеҲқе§ӢеҢ–CyberзҺҜеўғпјҢжҺҘдёӢжқҘеҲӣе»әдёҖдёӘModuleControllerзұ»еҜ№иұЎcontrollerпјҢд№ӢеҗҺи°ғз”Ёcontroller.Init()еҗҜеҠЁзӣёе…іеҠҹиғҪжЁЎеқ—гҖӮиҝӣе…ҘCyber RTзҡ„ж¶ҲжҒҜеҫӘзҺҜпјҢзӯүеҫ…cyber::WaitForShutdown()иҝ”еӣһпјҢжё…зҗҶиө„жәҗ并йҖҖеҮәMainеҮҪж•°гҖӮModuleController::Init()еҮҪж•°еҶ…йғЁи°ғз”ЁдәҶModuleController::LoadAll()еҮҪж•°пјҡ
1bool ModuleController::LoadAll() {
2 const std::string work_root = common::WorkRoot();
3 const std::string current_path = common::GetCurrentPath();
4 const std::string dag_root_path = common::GetAbsolutePath(work_root, "dag");
5
6 for (auto& dag_conf : args_.GetDAGConfList()) {
7 std::string module_path = "";
8 if (dag_conf == common::GetFileName(dag_conf)) {
9 // case dag conf argument var is a filename
10 module_path = common::GetAbsolutePath(dag_root_path, dag_conf);
11 } else if (dag_conf[0] == '/') {
12 // case dag conf argument var is an absolute path
13 module_path = dag_conf;
14 } else {
15 // case dag conf argument var is a relative path
16 module_path = common::GetAbsolutePath(current_path, dag_conf);
17 if (!common::PathExists(module_path)) {
18 module_path = common::GetAbsolutePath(work_root, dag_conf);
19 }
20 }
21 AINFO << "Start initialize dag: ">
дёҠиҝ°еҮҪж•°еӨ„зҗҶдёҖдёӘdag_confй…ҚзҪ®ж–Ү件еҫӘзҺҜпјҢиҜ»еҸ–й…ҚзҪ®ж–Ү件дёӯзҡ„жүҖжңүdag_confпјҢ并йҖҗдёҖи°ғз”Ёbool ModuleController::LoadModule(const std::string& path)еҮҪж•°еҠ иҪҪеҠҹиғҪжЁЎеқ—гҖӮ
еҜ№иұЎзҡ„еҲӣе»әиҝҮзЁӢ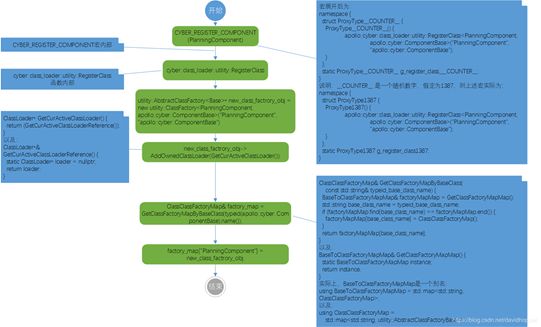
иҝӣдёҖжӯҘеұ•ејҖпјҡ
1#define CLASS_LOADER_REGISTER_CLASS_INTERNAL(Derived, Base, UniqueID) \
2 namespace { \
3 struct ProxyType##UniqueID { \
4 ProxyType##UniqueID() { \
5 apollo::cyber::class_loader::utility::RegisterClass( \
6 #Derived, #Base); \
7 } \
8 }; \
9 static ProxyType##UniqueID g_register_class_##UniqueID; \
10 }е°ҶPlanningComponentд»Је…ҘпјҢжңҖз»Ҳеҫ—еҲ°пјҡ
1 namespace {
2 struct ProxyType__COUNTER__ {
3 ProxyType__COUNTER__() {
4 apollo::cyber::class_loader::utility::RegisterClass<planningcomponent, apollo::cyber::componentbase>(
5 "PlanningComponent", "apollo::cyber::ComponentBase");
6 }
7 };
8 static ProxyType__COUNTER__ g_register_class___COUNTER__;
9 }
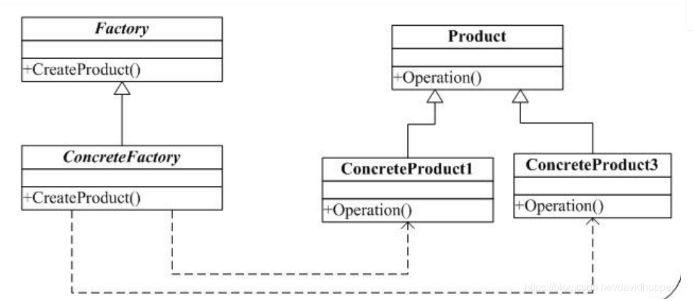
</planningcomponent, apollo::cyber::componentbase>еҲӣе»әдёҖдёӘжЁЎжқҝзұ»utility::ClassFactory<derived, base=""></derived,>еҜ№иұЎnew_class_factrory_objпјҢдёәе…¶ж·»еҠ зұ»еҠ иҪҪеҷЁпјҢи®ҫзҪ®еҠ иҪҪеә“зҡ„и·Ҝеҫ„пјҢе°Ҷе·ҘеҺӮзұ»еҜ№иұЎеҠ е…ҘеҲ°ClassClassFactoryMapеҜ№иұЎfactory_mapз»ҹдёҖз®ЎзҗҶгҖӮйҖҡиҝҮиҜҘеҮҪж•°пјҢCyberдҪҝз”Ёе·ҘеҺӮж–№жі•жЁЎејҸе®ҢжҲҗдә§е“Ғзұ»еҜ№иұЎзҡ„еҲӣе»әпјҡ
еҠЁжҖҒеҲӣе»әиҝҮзЁӢ
第дёҖйғЁеҲҶд»Ӣз»ҚжЁЎеқ—дё»е…ҘеҸЈж—¶пјҢжҸҗеҸҠbool ModuleController::LoadModule(const std::string& path)еҮҪж•°пјҢжӯЈжҳҜиҜҘеҮҪж•°еҠЁжҖҒеҲӣе»әеҮәдәҶapollo::planning::PlanningComponentзұ»еҜ№иұЎгҖӮ
еҮҪж•°еҶ…йғЁи°ғз”ЁеҲҶжһҗеҰӮдёӢпјҡ
1bool ModuleController::LoadModule(const std::string& path) {
2 DagConfig dag_config;
3 if (!common::GetProtoFromFile(path, &dag_config)) {
4 AERROR << "Get proto failed, file: ">дёҠиҝ°еҮҪж•°д»ҺзЈҒзӣҳй…ҚзҪ®ж–Ү件иҜ»еҸ–й…ҚзҪ®дҝЎжҒҜпјҢ并и°ғз”Ёbool ModuleController::LoadModule(const DagConfig& dag_config)еҮҪж•°еҠ иҪҪеҠҹиғҪжЁЎеқ—пјҡ
1bool ModuleController::LoadModule(const DagConfig& dag_config) {
2 const std::string work_root = common::WorkRoot();
3
4 for (auto module_config : dag_config.module_config()) {
5 std::string load_path;
6 // ...
7 class_loader_manager_.LoadLibrary(load_path);
8 for (auto& component : module_config.components()) {
9 const std::string& class_name = component.class_name();
10 std::shared_ptr base =
11 class_loader_manager_.CreateClassObj(class_name);
12 if (base == nullptr) {
13 return false;
14 }
15
16 if (!base->Initialize(component.config())) {
17 return false;
18 }
19 component_list_.emplace_back(std::move(base));
20 }
21
22 // ...
23 }
24 return true;
25}
е·ҘеҺӮзұ»еҜ№иұЎжҢҮй’ҲжүҫеҲ°еҗҺпјҢдҪҝз”Ёclassobj = factory->CreateObj();е°ұйЎәзҗҶжҲҗз« ең°е°ҶPlanningComponentзұ»еҜ№иұЎеҲӣе»әеҮәжқҘдәҶгҖӮ
е…·дҪ“规еҲ’з®—жі•еҲҶжһҗ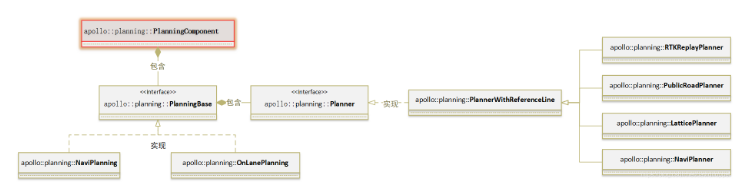
PublicRoadPlanner规еҲ’з®—жі•
PublicRoadPlannerз®—жі•д»ҺRoutingжЁЎеқ—иҫ“еҮәзҡ„й«ҳзІҫең°еӣҫLaneеәҸеҲ—иҺ·еҫ—е…ЁеұҖеҜјиҲӘи·Ҝеҫ„гҖӮ
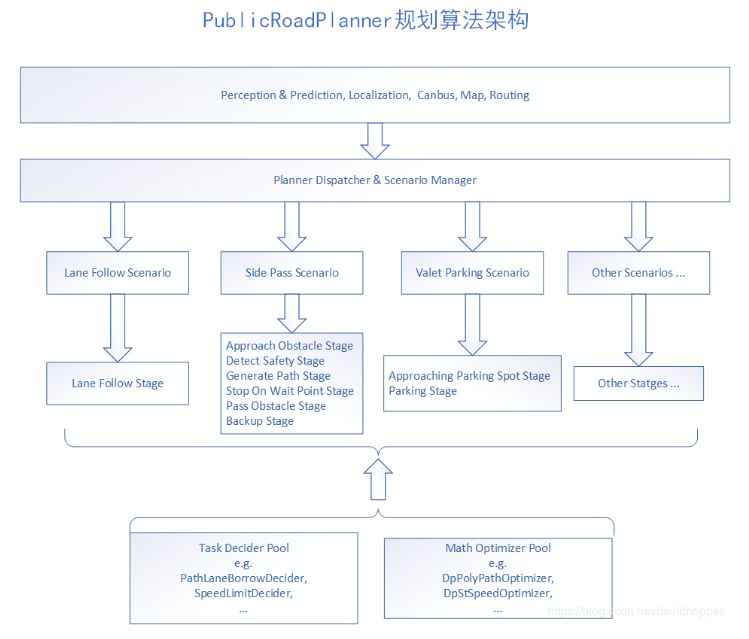
еҹәдәҺеңәжҷҜгҖҒйҳ¶ж®өе’Ңд»»еҠЎзҡ„зҗҶеҝөиҝӣиЎҢ规еҲ’пјҢдјҳзӮ№жҳҜиғҪеҗҲзҗҶжңүж•Ҳең°еә”еҜ№жҜҸз§ҚеңәжҷҜпјҢжҳ“дәҺжү©е……пјҢ并且еҹәдәҺй…ҚзҪ®ж–Ү件еҠЁжҖҒеўһеҮҸеңәжҷҜгҖҒйҳ¶ж®өеҸҠдҪҝз”Ёзҡ„д»»еҠЎпјҢзҒөжҙ»жҖ§ејәпјӣзјәзӮ№жҳҜеҸҜиғҪдјҡйҒ—жјҸдёҖдәӣзү№ж®ҠеңәжҷҜпјҢдҪҶеҸҜйҖҡиҝҮдёҚж–ӯжү©е……ж–°зҡ„еңәжҷҜеҠ д»Ҙи§ЈеҶігҖӮ
иҜҘз®—жі•зҡ„дё»иҰҒжү§иЎҢжөҒзЁӢеҰӮдёӢпјҡ

еҸҜеҖҹеҠ©GDBи°ғиҜ•е‘Ҫд»ӨеҜ№дёҠиҝ°жү§иЎҢжөҒзЁӢиҝӣиЎҢжӣҙдёәж·ұе…Ҙзҡ„зҗҶи§ЈпјҢдҫӢеҰӮTrafficLightProtectedStageApproachйҳ¶ж®өзҡ„PathLaneBorrowDeciderд»»еҠЎзҡ„и°ғз”Ёе Ҷж ҲпјҢд»ҺдёӢеҫҖдёҠзңӢпјҢеҜ№дәҺд»»ж„ҸдёҖдёӘд»»еҠЎзҡ„и°ғз”ЁжөҒзЁӢдёҖзӣ®дәҶ然пјҡ
#0 apollo::planning::PathLaneBorrowDecider::Process (this=0x7f8c28294460, frame=0x7f8c38029f70,
2 reference_line_info=0x7f8c3802b140) at modules/planning/tasks/deciders/path_lane_borrow_decider/path_lane_borrow_decider.cc:39
3#1 0x00007f8c0468b7c8 in apollo::planning::Decider::Execute (this=0x7f8c28294460, frame=0x7f8c38029f70,
4 reference_line_info=0x7f8c3802b140) at modules/planning/tasks/deciders/decider.cc:31
5#2 0x00007f8c065c4a01 in apollo::planning::scenario::Stage::ExecuteTaskOnReferenceLine (this=0x7f8c28293eb0,
6 planning_start_point=..., frame=0x7f8c38029f70) at modules/planning/scenarios/stage.cc:96
7#3 0x00007f8c06e721da in apollo::planning::scenario::traffic_light::TrafficLightProtectedStageApproach::Process (
8 this=0x7f8c28293eb0, planning_init_point=..., frame=0x7f8c38029f70) at
9 modules/planning/scenarios/traffic_light/protected/stage_approach.cc:48
10#4 0x00007f8c067f1732 in apollo::planning::scenario::Scenario::Process (
11 this=0x7f8c2801bf20, planning_init_point=..., frame=0x7f8c38029f70)
12 at modules/planning/scenarios/scenario.cc:76
13#5 0x00007f8c186e153a in apollo::planning::PublicRoadPlanner::Plan (
14 this=0x23093de0, planning_start_point=..., frame=0x7f8c38029f70,
15 ptr_computed_trajectory=0x7f8b9a5fbed0) at modules/planning/planner/public_road/public_road_planner.cc:51
16#6 0x00007f8c19ee5937 in apollo::planning::OnLanePlanning::Plan (
17 this=0x237f3b0, current_time_stamp=1557133995.3679764, stitching_trajectory=std::vector of length 1,
18 capacity 1 = {...}, ptr_trajectory_pb=0x7f8b9a5fbed0) at modules/planning/on_lane_planning.cc:436
19#7 0x00007f8c19ee40fa in apollo::planning::OnLanePlanning::RunOnce (
20 this=0x237f3b0, local_view=..., ptr_trajectory_pb=0x7f8b9a5fbed0) at modules/planning/on_lane_planning.cc:304
21#8 0x00007f8c1ab0d494 in apollo::planning::PlanningComponent::Proc (
22 this=0x1d0f310, prediction_obstacles=std::shared_ptr (count 4, weak 0) 0x7f8b840164f8,
23 chassis=std::shared_ptr (count 4, weak 0) 0x7f8b84018a08,
24 localization_estimate=std::shared_ptr (count 4, weak 0) 0x7f8b8400d3b8) at modules/planning/planning_component.cc:134
25#9 0x00007f8c1abb46c4 in apollo::cyber::Component<apollo::prediction::predictionobstacles, < span="">
26 apollo::canbus::Chassis, apollo::localization::LocalizationEstimate, apollo::cyber::NullType>::Process (this=0x1d0f310,
27 msg0=std::shared_ptr (count 4, weak 0) 0x7f8b840164f8, msg1=std::shared_ptr (count 4, weak 0) 0x7f8b84018a08,
28 msg2=std::shared_ptr (count 4, weak 0) 0x7f8b8400d3b8) at ./cyber/component/component.h:291
29#10 0x00007f8c1aba2698 in apollo::cyber::Component<apollo::prediction::predictionobstacles, < span="">
30 apollo::canbus::Chassis, apollo::localization::LocalizationEstimate, apollo::cyber::NullType>::Initialize(
31 apollo::cyber::proto::ComponentConfig const&)::{lambda(std::shared_ptr<apollo::prediction::predictionobstacles> const&,
32 std::shared_ptr const&, std::shared_ptr<apollo::localization::localizationestimate> const&)#2}::operator()
33 (std::shared_ptr<apollo::prediction::predictionobstacles> const&, std::shared_ptr const&,
34 std::shared_ptr<apollo::localization::localizationestimate> const&) const (__closure=0x2059a430,
35 msg0=std::shared_ptr (count 4, weak 0) 0x7f8b840164f8, msg1=std::shared_ptr (count 4, weak 0) 0x7f8b84018a08,
36 msg2=std::shared_ptr (count 4, weak 0) 0x7f8b8400d3b8) at ./cyber/component/component.h:378
37#11 0x00007f8c1abb4ad2 in apollo::cyber::croutine::RoutineFactory apollo::cyber::croutine::CreateRoutineFactory
38 <apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
39 apollo::cyber::Component<apollo::prediction::predictionobstacles, apollo::canbus::chassis,
40 apollo::localization::LocalizationEstimate, apollo::cyber::NullType>::Initialize(
41 apollo::cyber::proto::ComponentConfig const&)::{lambda(std::shared_ptr<apollo::prediction::predictionobstacles> const&,
42 std::shared_ptr const&, std::shared_ptr<apollo::localization::localizationestimate> const&)#2}&>
43 (apollo::cyber::Component<apollo::prediction::predictionobstacles, apollo::canbus::chassis,
44 apollo::localization::LocalizationEstimate, apollo::cyber::NullType>::Initialize(apollo::cyber::proto::ComponentConfig const&)::
45 {lambda(std::shared_ptr<apollo::prediction::predictionobstacles> const&, std::shared_ptr const&,
46 std::shared_ptr<apollo::localization::localizationestimate> const&)#2}&,
47 std::shared_ptr<apollo::cyber::data::datavisitor<apollo::prediction::predictionobstacles,
48 apollo::canbus::Chassis, apollo::localization::LocalizationEstimate, apollo::cyber::NullType> > const&)::
49 {lambda()#1}::operator()() const::{lambda()#1}::operator()() const (__closure=0x2059a420) at ./cyber/croutine/routine_factory.h:108
50#12 0x00007f8c1ac0466a in std::_Function_handler<void (), apollo::cyber::croutine::routinefactory < span="">
51apollo::cyber::croutine::CreateRoutineFactory<apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
52apollo::cyber::Component<apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
53apollo::cyber::NullType>::Initialize(apollo::cyber::proto::ComponentConfig const&)::{lambda(std::shared_ptr<apollo::prediction::predictionobstacles> const&,
54std::shared_ptr const&, std::shared_ptr<apollo::localization::localizationestimate> const&)#2}&>
55(apollo::cyber::Component<apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
56apollo::cyber::NullType>::Initialize(apollo::cyber::proto::ComponentConfig const&)::{lambda(std::shared_ptr<apollo::prediction::predictionobstacles> const&,
57std::shared_ptr const&, std::shared_ptr<apollo::localization::localizationestimate> const&)#2}&,
58std::shared_ptr<apollo::cyber::data::datavisitor<apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
59apollo::cyber::NullType> > const&)::{lambda()#1}::operator()() const::{lambda()#1}>::_M_invoke(std::_Any_data const&) (__functor=...) at
60/usr/include/c++/4.8/functional:2071
61#13 0x00007f8c5f5b86e8 in std::function::operator()() const (this=0x205f1160) at /usr/include/c++/4.8/functional:2471
62#14 0x00007f8c57560cbc in apollo::cyber::croutine::CRoutine::Run (this=0x205f1148) at ./cyber/croutine/croutine.h:143
63#15 0x00007f8c5755ff55 in apollo::cyber::croutine::(anonymous namespace)::CRoutineEntry (arg=0x205f1148) at cyber/croutine/croutine.cc:43
</apollo::cyber::data::datavisitor<apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
</apollo::localization::localizationestimate></apollo::prediction::predictionobstacles></apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
</apollo::localization::localizationestimate></apollo::prediction::predictionobstacles></apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
</apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
</void (), apollo::cyber::croutine::routinefactory <></apollo::cyber::data::datavisitor<apollo::prediction::predictionobstacles,
</apollo::localization::localizationestimate></apollo::prediction::predictionobstacles></apollo::prediction::predictionobstacles, apollo::canbus::chassis,
</apollo::localization::localizationestimate></apollo::prediction::predictionobstacles></apollo::prediction::predictionobstacles, apollo::canbus::chassis,
</apollo::prediction::predictionobstacles, apollo::canbus::chassis, apollo::localization::localizationestimate,
</apollo::localization::localizationestimate></apollo::prediction::predictionobstacles></apollo::localization::localizationestimate></apollo::prediction::predictionobstacles></apollo::prediction::predictionobstacles, <></apollo::prediction::predictionobstacles, <>жүҖжңү规еҲ’з®—жі•е…ұз”Ёзҡ„жөҒзЁӢз•ҘеҺ»дёҚиЎЁпјҢдёҺPublicRoadPlanner规еҲ’з®—жі•зӣёе…ізҡ„жңүдёӨеӨ„пјҢдёҖеӨ„жҳҜPublicRoadPlanner::InitпјҢеҸҰдёҖеӨ„жҳҜPublicRoadPlanner::PlanгҖӮ
дёӢйқўжқҘзңӢеңәжҷҜжӣҙж–°еҮҪж•°ScenarioManager::Updateзҡ„д»Јз Ғпјҡ
1void ScenarioManager::Update(const common::TrajectoryPoint& ego_point,
2 const Frame& frame) {
3 CHECK(!frame.reference_line_info().empty());
4 Observe(frame);
5 ScenarioDispatch(ego_point, frame);
6}иҜҘеҮҪж•°еҢ…еҗ«дёӨдёӘеӯҗеҮҪж•°пјҡScenarioManager::Observeе’ҢScenarioManager::ScenarioDispatchпјҢе…¶дёӯеүҚиҖ…з”ЁдәҺжӣҙж–°first_encountered_overlap_map_пјҢд»Јз ҒеҰӮдёӢжүҖзӨәпјҡ
1void ScenarioManager::Observe(const Frame& frame) {
2 // init first_encountered_overlap_map_
3 first_encountered_overlap_map_.clear();
4 const auto& reference_line_info = frame.reference_line_info().front();
5 const auto& first_encountered_overlaps =
6 reference_line_info.FirstEncounteredOverlaps();
7 for (const auto& overlap : first_encountered_overlaps) {
8 if (overlap.first == ReferenceLineInfo::PNC_JUNCTION ||
9 overlap.first == ReferenceLineInfo::SIGNAL ||
10 overlap.first == ReferenceLineInfo::STOP_SIGN ||
11 overlap.first == ReferenceLineInfo::YIELD_SIGN) {
12 first_encountered_overlap_map_[overlap.first] = overlap.second;
13 }
14 }
15}д»ҘдёҠе°ұжҳҜеҰӮдҪ•иҝӣиЎҢPlanning жЁЎеқ—жәҗд»Јз ҒеҲҶжһҗпјҢе°Ҹзј–зӣёдҝЎжңүйғЁеҲҶзҹҘиҜҶзӮ№еҸҜиғҪжҳҜжҲ‘们ж—Ҙеёёе·ҘдҪңдјҡи§ҒеҲ°жҲ–з”ЁеҲ°зҡ„гҖӮеёҢжңӣдҪ иғҪйҖҡиҝҮиҝҷзҜҮж–Үз« еӯҰеҲ°жӣҙеӨҡзҹҘиҜҶгҖӮжӣҙеӨҡиҜҰжғ…敬иҜ·е…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“гҖӮ





