linux下公有64个信号,kill -l 查看一下: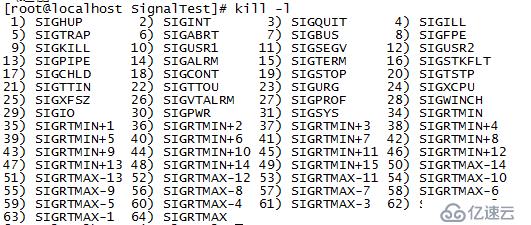
可以看到,缺少了32、33两个未知信号,从这里分界,前面31个信号是不可靠信号,后面的是可靠信号。当进程发生阻塞的时候(一下子发送很多信号),不可靠信号容易丢失。如何去验证呢?可以在2(不可靠信号)号信号和34(可靠进程)号信号屏蔽期间,不断向某个进程发送这两个信号,待解除屏蔽后,观察是否丢失。这里测试的时候,要注意一下,9-SIGKILL 19-SIGSTOP 31 32 这4个信号是不能被捕获的,遍历以下所有信号就可以发现了。
<br>
首先,讲一下信号集,顾名思义,存放信号的集合。
信号集的操作函数有以下几个,具体使用,后面再说。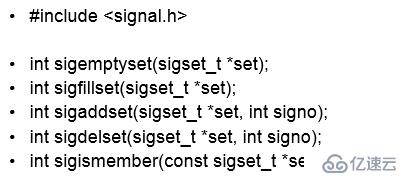
第一种是利用signal,kill函数。
#include < signal.h>
typedef void (*sighandler_t)(int);
sighandler_t signal(int signum, sighandler_t handler);signal()有两个参数:信号编号和处理函数(sighandler_t是一个函数指针),返回值也是一个sighandler_t类型的,这里返回的是之前的信号处理函数。
信号处理函数是一个带int参数,返回值为void的函数。handler也可以是两个特殊的值:SIG_IGN 屏蔽该信号 SIG_DFL 恢复默认行为
#include < sys/types.h>
#include < signal.h>
int kill(pid_t pid, int sig);kill()的作用是把信号sig发送给进程pid。
#include <signal.h>
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset);功能:读取过更改进程的信号屏蔽字。
返回值:成功为0,失败为-1
参数:如果oset是非空指针,则读取进程的当前信号屏蔽字通过oset参数传出(就是将原来的信号屏蔽字备份到oset);set是更改进程的信号屏蔽字,how指示如何修改。how的可选值如下: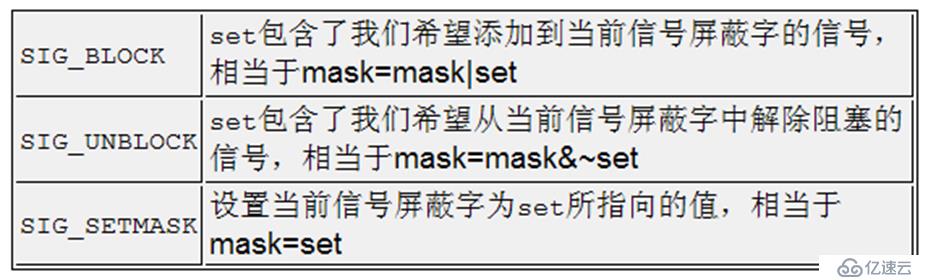
代码如下:
// 3.不可靠信号的丢失
void handler(int no)
{
printf("received a signal: %d\n",no);
}
int main()
{
pid_t pid;
sigset_t set;
sigset_t oset;
int i;
sigemptyset(&set); //清空
sigaddset(&set,2); //添加2号信号
sigaddset(&set,34); //添加34号信号
for(i = 1 ; i <= 64 ; i++) //查看集合状态
{
if(sigismember(&set,i) == 1)
{
printf("1");
}
else
{
printf("0");
}
}
printf("\n");
sigprocmask(SIG_SETMASK,&set,&oset); //将这个集合设置为这个进程的阻塞信号集
//绑定信号
signal(2,handler);
signal(34,handler);
sleep(50); //在此期间,向该进程发送多次2、34号信号
sigprocmask(SIG_SETMASK,&oset,NULL);//解除绑定
while(1)
{
}
return 0;
}在另一个终端(20s内),发送信号: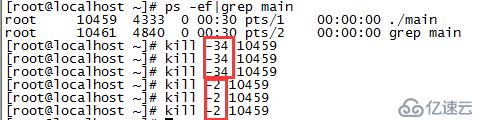
结果,可以看到,不可靠信号,只收到了一次:
第二种是sigacton函数。
#include <signal.h>
int sigaction(int signum, const struct sigaction *act,
struct sigaction *oldact);功能:用于改变进程接收到特定信号后的行为。
参数:signum 除了SIGKILL 和SIGSTOP(为这两个信号定义自己的处理函数,将导致信号安装错误);
第二个参数是指向结构sigaction的一个实例的指针,在结构sigaction的实例中,制定了对特定信号的处理,可以为空,进程会以缺省方式对信号处理;
old用来保存原来对信号的处理,可以为NULL。
返回值:成功为0,失败-1
sigaction结构体
struct sigaction {
void (*sa_handler)(int);
void (*sa_sigaction)(int, siginfo_t *, void *);
sigset_t sa_mask;
int sa_flags;
void (*sa_restorer)(void);
};参数:
前两个参数sa_handler和sa_sigaction都是自定义信号处理函数,同样,sa_handler有两个默认值:SIG_DFL和SIG_IGN。区别在于sa_sigaction是为实时信号而设定的(也支持非实时信号),第二个参数是指向siginfo_t结构的指针,结构中包含信号携带的数据值,第三个参数暂时没有使用(POSIX没有规范使用该指针的标准);
sa_mask是屏蔽信号集;
sa_flags有以下几个值: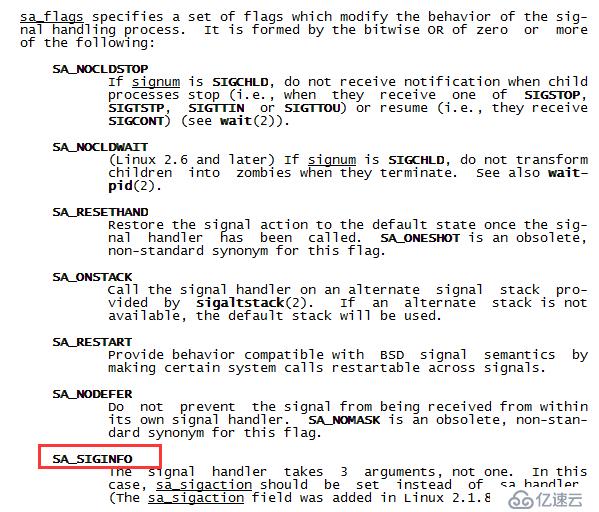
重点掌握2个:一个是设置为0,表示默认属性;一个是设置为SA_SIGINFO,那么此时处理函数不再使用sa_handler,而是sa_sigaction.
那么sa_sigaction的结构体参数长什么样呢?
siginfo_t {
int si_signo; /* Signal number */
int si_errno; /* An errno value */
int si_code; /* Signal code */
pid_t si_pid; /* Sending process ID */
uid_t si_uid; /* Real user ID of sending process */
int si_status; /* Exit value or signal */
clock_t si_utime; /* User time consumed */
clock_t si_stime; /* System time consumed */
sigval_t si_value; /* Signal value */
int si_int; /* POSIX.1b signal */
void *si_ptr; /* POSIX.1b signal */
void *si_addr; /* Memory location which caused fault */天哪,肯定记不住。不需要记,用到的时候,查一下就好了。
这里掌握两个,一个是si_signum,不用说了吧,一个是si_value。这是什么?这是在发送信号时携带的一个数据,数据类是sigval,这是一个联合体。
typedef union sigval
{
int sival_int;
void *sival_ptr;
}sigval_t; sigqueue函数
#include < signal.h>
int sigqueue(pid_t pid, int sig, const union sigval value);sigqueue()类似于之前的kill()。是用来发送信号的,主要针对有带参的信号,与sigaction()配合使用。
第三个参数是一个联合数据结构union sigval,指定了信号传递的参数,即通常所说的4字节值。
具体代码如下:
void handler(int signo,siginfo_t *resdata,void *unknowp)
{
printf("signo=%d\n",signo);
printf("return data :%d\n",resdata->si_value.sival_int);
}
int main()
{
int i = 5;
pid_t pid = 0;
pid = fork();
if(pid == -1)
{
perror("create fork");
return -1;
}
else if(pid == 0)
{
sleep(1);
//向父进程发送带整型数据的信号
union sigval sigvalue;
sigvalue.sival_int = 111;
//发送信号
while(i--)
{
sigqueue(getppid(),2,sigvalue);
printf("send signal:2 success!\n");
sigqueue(getppid(),34,sigvalue);
printf("send signal:34 success!\n");
}
}
else
{
struct sigaction act;
//初始化sa_mask
sigemptyset(&act.sa_mask);
act.sa_sigaction=handler;
//一旦使用了sa_sigaction属性,那么必须设置sa_flags属性的值为SA_SIGINFO
act.sa_flags=SA_SIGINFO;
//注册信号
sigaction(2,&act,NULL);
sigaction(34,&act,NULL);
}
while(1)
{
}
}
运行结果: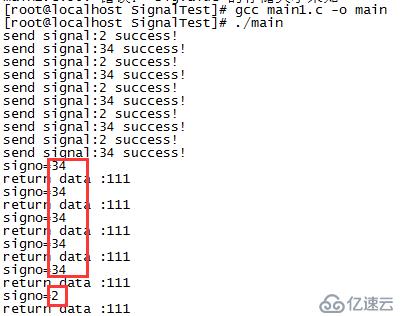
同样,可以看到2号信号只收到了1次。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





