Ubuntu16.04еҰӮдҪ•е®үиЈ…ROS kinetic
иҝҷзҜҮж–Үз« з»ҷеӨ§е®¶еҲҶдә«зҡ„жҳҜжңүе…іUbuntu16.04еҰӮдҪ•е®үиЈ…ROS kineticзҡ„еҶ…е®№гҖӮе°Ҹзј–и§үеҫ—жҢәе®һз”Ёзҡ„пјҢеӣ жӯӨеҲҶдә«з»ҷеӨ§е®¶еҒҡдёӘеҸӮиҖғпјҢдёҖиө·и·ҹйҡҸе°Ҹзј–иҝҮжқҘзңӢзңӢеҗ§гҖӮ
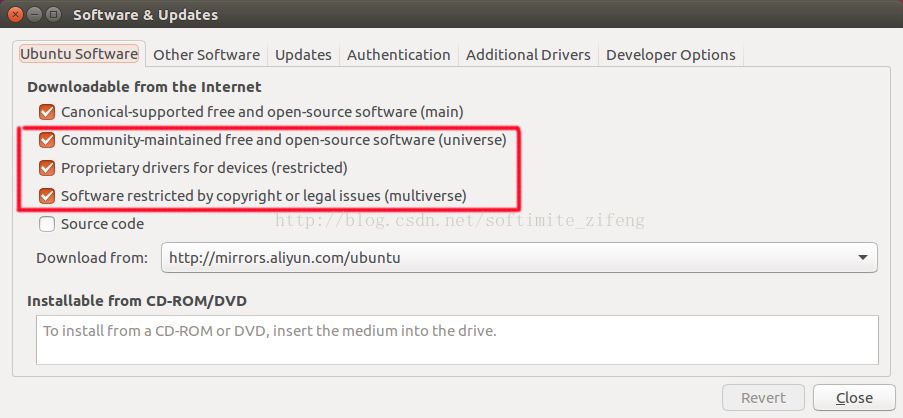
1. й…ҚзҪ®Ubuntuзҡ„иө„жәҗеә“пјҡ
"restricted"пјҢ"universe"е’Ң"multiverse"гҖӮдёҖиҲ¬жғ…еҶөжҳҜдёҚз”Ёй…ҚзҪ®зҡ„пјҢеҸӮиҖғдёӢеӣҫзәўиүІжЎҶйғЁеҲҶгҖӮ
еҰӮжһңжІЎжңүй…ҚзҪ®пјҢеҸҜд»ҘеҸӮиҖғUbuntuе®ҳзҪ‘пјҡзӮ№еҮ»жү“ејҖй“ҫжҺҘ
2. и®ҫзҪ®Ubuntuзҡ„sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu
$(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3. и®ҫзҪ®key
sudo apt-key adv --keyserver hkp:
еҰӮжһңж— жі•иҝһжҺҘдёҠиҝ°жңҚеҠЎеҷЁпјҢеҸҜд»Ҙе°қиҜ•hkp://pgp.mit.edu:80жҲ–иҖ…hkp://keyserver.ubuntu.com:80
4. жӣҙж–°package
sudo apt-get update
5. е®үиЈ…ROS kineticе®Ңж•ҙзүҲ
sudo apt-get install ros-kinetic-desktop-full
е®үиЈ…е®ҢеҸҜд»ҘжҹҘзңӢеҸҜз”Ёзҡ„packageпјҡ
apt-cache search ros-kinetic
6. еҲқе§ӢеҢ–rosdep
еңЁдҪҝз”ЁROSд№ӢеүҚеҝ…йЎ»иҰҒеҲқе§ӢеҢ–rosdep
7. й…ҚзҪ®зҺҜеўғ
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
8. е®үиЈ…building packageзҡ„дҫқиө–
sudo apt-get install python-rosinstall python-rosinstall-generator
python-wstool build-essential
9. жөӢиҜ•ROSе®үиЈ…жҲҗеҠҹ
1) жү“ејҖTermialпјҢиҫ“е…Ҙд»ҘдёӢе‘Ҫд»ӨпјҢеҲқе§ӢеҢ–ROSзҺҜеўғпјҡ
roscore
2) жү“ејҖж–°зҡ„TermialпјҢиҫ“е…Ҙд»ҘдёӢе‘Ҫд»ӨпјҢеј№еҮәдёҖдёӘе°Ҹд№ҢйҫҹзӘ—еҸЈпјҡ
rosrun turtlesim turtlesim_node
3) жү“ејҖж–°зҡ„TermialпјҢиҫ“е…Ҙд»ҘдёӢе‘Ҫд»ӨпјҢеҸҜд»ҘеңЁTermialдёӯйҖҡиҝҮж–№еҗ‘й”®жҺ§еҲ¶е°Ҹд№Ңйҫҹзҡ„移еҠЁпјҡ
rosrun turtlesim turtle_teleop_key

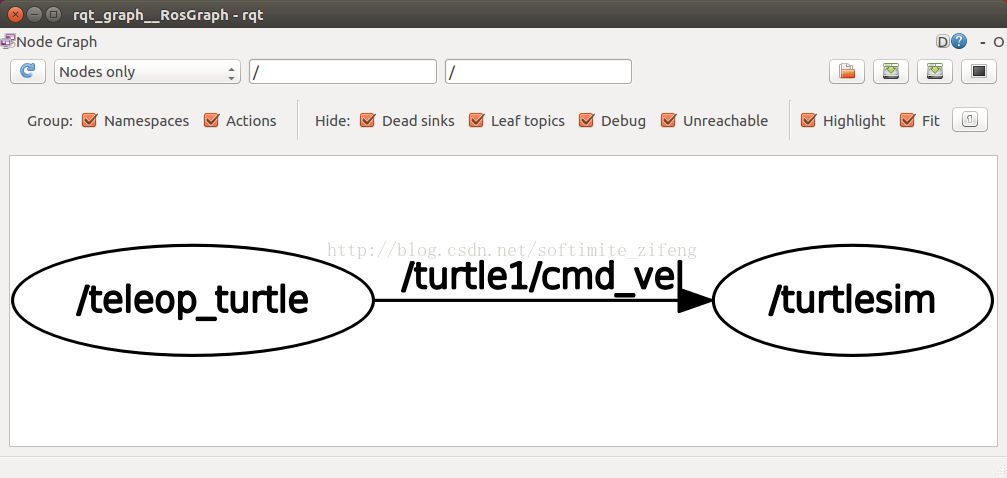
4) жү“ејҖж–°зҡ„TermialпјҢиҫ“е…Ҙд»ҘдёӢе‘Ҫд»ӨпјҢеј№еҮәж–°зҡ„зӘ—еҸЈжҹҘзңӢROSиҠӮзӮ№дҝЎжҒҜпјҡ
rosrun rqt_graph rqt_graph
ж„ҹи°ўеҗ„дҪҚзҡ„йҳ…иҜ»пјҒе…ідәҺвҖңUbuntu16.04еҰӮдҪ•е®үиЈ…ROS kineticвҖқиҝҷзҜҮж–Үз« е°ұеҲҶдә«еҲ°иҝҷйҮҢдәҶпјҢеёҢжңӣд»ҘдёҠеҶ…е®№еҸҜд»ҘеҜ№еӨ§е®¶жңүдёҖе®ҡзҡ„её®еҠ©пјҢи®©еӨ§е®¶еҸҜд»ҘеӯҰеҲ°жӣҙеӨҡзҹҘиҜҶпјҢеҰӮжһңи§үеҫ—ж–Үз« дёҚй”ҷпјҢеҸҜд»ҘжҠҠе®ғеҲҶдә«еҮәеҺ»и®©жӣҙеӨҡзҡ„дәәзңӢеҲ°еҗ§пјҒ





