这篇文章主要讲解了“OpenCV哈里斯角检测怎么应用”,文中的讲解内容简单清晰,易于学习与理解,下面请大家跟着小编的思路慢慢深入,一起来研究和学习“OpenCV哈里斯角检测怎么应用”吧!
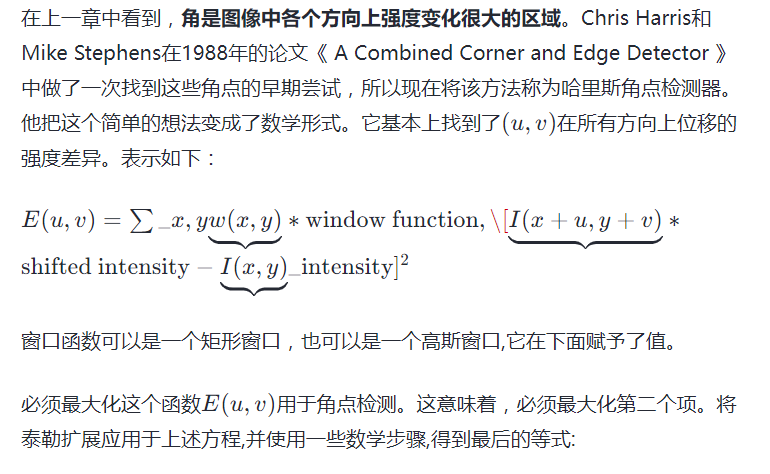
可以用如下图来表示:
因此,Harris Corner Detection的结果是具有这些分数的灰度图像。合适的阈值可提供图像的各个角落。
在OpenCV中有实现哈里斯角点检测,cv2.cornerHarris()。其参数为:
dst = cv2.cornerHarris(src, blockSize, ksize, k[, dst[, borderType]] )
src - 输入图像,灰度和float32类型
blockSize - 是拐角检测考虑的邻域大小
ksize - 使用的Sobel导数的光圈参数
k- 等式中的哈里斯检测器自由参数
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('chessboard.png')
img_copy = img.copy()
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
# result is dilated for marking the corners, not important
dst = cv2.dilate(dst, None)
# Threshold for an optimal value, it may vary depending on the image.
img[dst >0.01*dst.max()]=[255,0,0]
# plot
plt.subplot(121)
plt.imshow(img_copy, cmap='gray')
plt.xticks([])
plt.yticks([])
plt.subplot(122)
plt.imshow(img, cmap='gray')
plt.xticks([])
plt.yticks([])
plt.show()以下是结果:
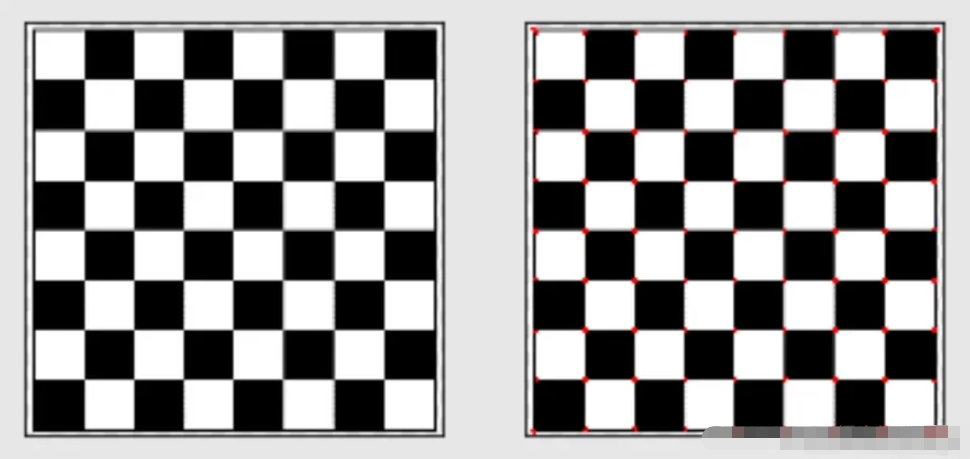
可以看到,各个角点已经标红。
有时候可能需要找到最精确的角点。OpenCV附带了一个函数cv2.cornerSubPix(),它进一步细化了以亚像素精度检测到的角点。下面是一个例子。
和之前一样,首先需要先找到哈里斯角点
然后通过这些角的质心(可能在一个角上有一堆像素,取它们的质心)来细化它们
Harris角用红色像素标记,SubPixel角用绿色像素标记
对于cv2.cornerSubPix()函数,必须定义停止迭代的条件。我们可以在特定的迭代次数或达到一定的精度后停止它。此外,还需要定义它将搜索角点的邻居的大小。
corners = cv.cornerSubPix( image, corners, winSize, zeroZone, criteria )
image: 输入图像,单通道
corners: 输入的初始坐标和为输出提供的精制坐标
winSize: 搜索窗口的一半侧面长度
zeroZone: 搜索区域中间的死区大小的一半在下面的公式中的求和,有时用于避免自相关矩阵的可能奇点。(−1,−1)(-1,-1)(−1,−1) 的值表示没有这样的尺寸
criteria: 终止角点细化过程的条件
# sub pixel更精度角点
import cv2
import numpy as np
img = cv2.imread('chessboard2.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# find Harris corners
dst = cv2.cornerHarris(gray,2, 3, 0.04)
dst = cv2.dilate(dst, None)
ret, dst = cv2.threshold(dst, 0.01*dst.max(), 255,0)
dst = np.uint8(dst)
# find centroids
ret, labels, stats, centroids = cv2.connectedComponentsWithStats(dst)
# define the criteria to stop and refine the corners
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 100, 0.001)
corners = cv2.cornerSubPix(gray, np.float32(centroids), (5, 5), (-1, -1), criteria)
# Now draw them
res = np.hstack((centroids,corners))
res = np.int0(res)
img[res[:,1],res[:,0]]=[0,0,255]
img[res[:,3],res[:,2]] = [0,255,0]
cv2.imshow('subpixel', img)
cv2.waitKey(0)
cv2.destroyAllWindows()以下是结果, 可以看到SubPixel更精确一点:
感谢各位的阅读,以上就是“OpenCV哈里斯角检测怎么应用”的内容了,经过本文的学习后,相信大家对OpenCV哈里斯角检测怎么应用这一问题有了更深刻的体会,具体使用情况还需要大家实践验证。这里是亿速云,小编将为大家推送更多相关知识点的文章,欢迎关注!
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。
原文链接:https://juejin.cn/post/7221159922905202725



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



