最近搞蓝牙,自己找网上的例子尝试编译,中间遇到了一些坑,记录一下:
#include <stdio.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <stdlib.h>
#include <poll.h>
#include <bluetooth/bluetooth.h>
#include <bluetooth/hci.h>
#include <bluetooth/hci_lib.h>
#include <bluetooth/l2cap.h>
void * Read_thread(void* pSK);
int main(int argc, char** argv)
{
int iRel = 0;
int sk = 0;
struct sockaddr_l2 local_addr;
struct sockaddr_l2 remote_addr;
int len;
int nsk = 0;
pthread_t nth = 0;
struct l2cap_options opts;
int optlen = 0;
int slen = 0;
char str[16] = {0};
if(argc < 2)
{
printf("\nUsage:%s psm\n", argv[0]);
exit(0);
}
// create l2cap socket
sk = socket(PF_BLUETOOTH, SOCK_SEQPACKET, BTPROTO_L2CAP); //发送数据,使用SOCK_SEQPACKET为好
if(sk < 0)
{
perror("\nsocket():");
exit(0);
}
//bind
local_addr.l2_family = PF_BLUETOOTH;
local_addr.l2_psm = htobs(atoi(argv[argc -1])); //last psm
bacpy(&local_addr.l2_bdaddr, BDADDR_ANY);
iRel = bind(sk, (struct sockaddr *)&local_addr, sizeof(struct sockaddr));
if(iRel < 0)
{
perror("\nbind()");
exit(0);
}
//get opts
// in mtu 和 out mtu.每个包的最大值
memset(&opts, 0, sizeof(opts));
optlen = sizeof(opts);
getsockopt(sk, SOL_L2CAP, L2CAP_OPTIONS, &opts, &optlen);
printf("\nomtu:[%d]. imtu:[%d]. flush_to:[%d]. mode:[%d]\n", opts.omtu, opts.imtu, opts.flush_to, opts.mode);
//set opts. default value
opts.omtu = 0;
opts.imtu = 672;
if (setsockopt(sk, SOL_L2CAP, L2CAP_OPTIONS, &opts, sizeof(opts)) < 0)
{
perror("\nsetsockopt():");
exit(0);
}
//listen
iRel = listen(sk, 10);
if(iRel < 0)
{
perror("\nlisten()");
exit(0);
}
len = sizeof(struct sockaddr_l2);
while(1)
{
memset(&remote_addr, 0, sizeof(struct sockaddr_l2));
nsk = accept(sk, (struct sockaddr*)(&remote_addr), &len);
if(nsk < 0)
{
perror("\naccept():");
continue;
}
ba2str(&(remote_addr.l2_bdaddr), str);
printf("\npeer bdaddr:[%s].\n", str); //得到peer的信息
iRel = pthread_create(&nth, NULL, Read_thread, &nsk);
if(iRel != 0)
{
perror("pthread_create():");
continue;
}
pthread_detach(nth); // 分离之
}
return 0;
}
void * Read_thread(void* pSK)
{
//struct pollfd fds[10];
struct pollfd fds[100];
char buf[1024] = {0};
int iRel = 0;
int exit_val = 0;
//fds[0].fd = *(int*)pSK;
//fds[0].events = POLLIN | POLLHUP;
fds[0].fd = (int)(*(int*)pSK);
fds[0].events = POLLIN | POLLHUP;
while(1)
{
if(poll(fds, 1, -1) < 0)
{
perror("\npoll():");
}
if(fds[0].revents & POLLHUP)
{
//hang up
printf("\n[%d] Hang up\n", *(int*)pSK);
close(*(int*)pSK);
pthread_exit(&exit_val);
break;
}
if(fds[0].revents & POLLIN)
{
memset(buf, 0 , 1024);
//read data
iRel = recv(*(int*)pSK, buf, 572, 0);
//printf("\nHandle[%d] Receive [%d] data:[%s]", *(int*)pSK, iRel, buf);
}
}
return 0;
}头文件:
#include <bluetooth/bluetooth.h> #include <bluetooth/hci.h> #include <bluetooth/hci_lib.h> #include <bluetooth/l2cap.h>
需要从以下网址下载两个文件:
http://www.bluez.org/download/
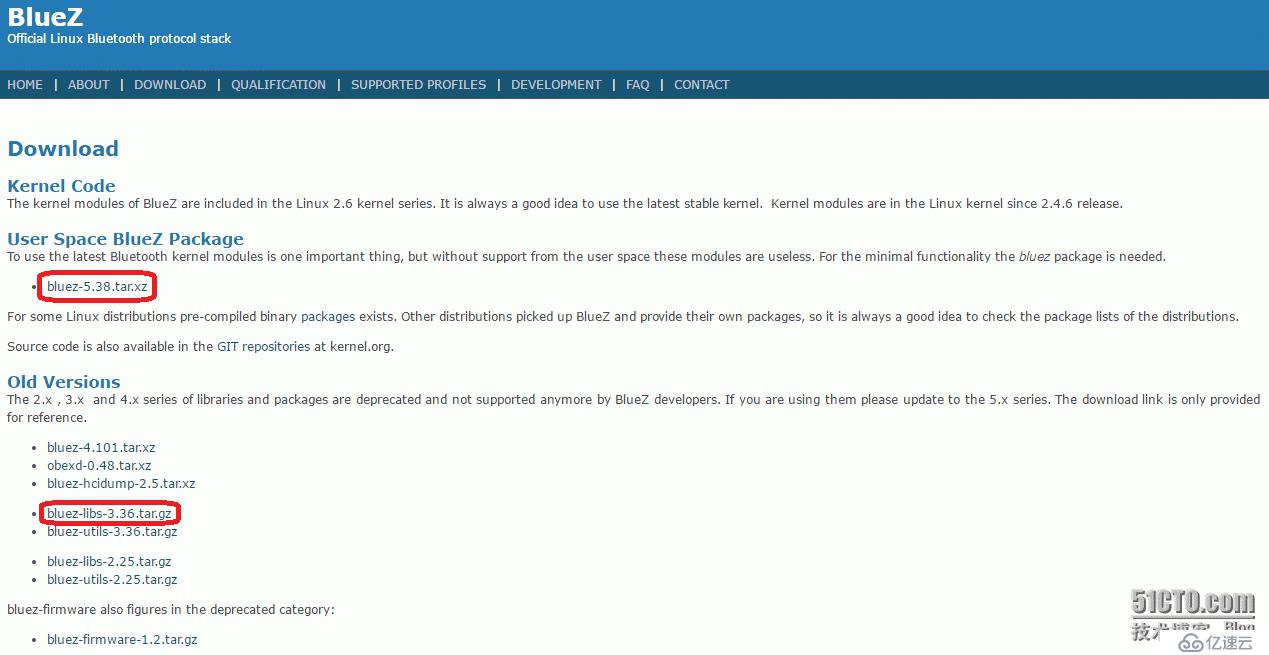
其中,头文件在bluez-5.38.tar.xz文件中有。
链接需要库文件libbluetooth.so.2
这个文件就要通过bluez-libs-3.36.tar.gz编译生成,执行两条命令就可以生成:
./configure make
将生成的库文件拷贝到/usr/lib目录下就可以了。
gcc编译的时候要加编译选项,这样才能编译成功:
gcc server.c -o server -I bluez-5.38/lib/ -lbluetooth -lpthread
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





