小编给大家分享一下python中遗传算法优化过程的实例,希望大家阅读完这篇文章后大所收获,下面让我们一起去探讨吧!
问题描述
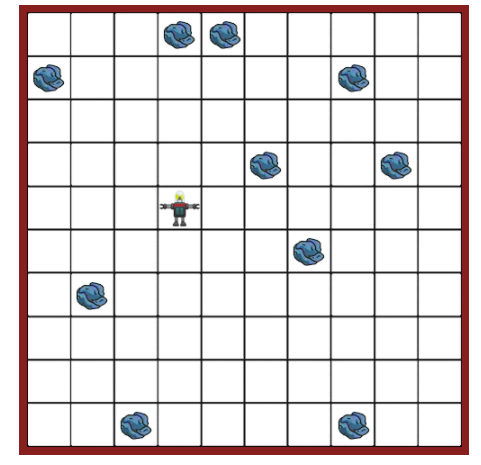
一个名为Robby的机器人生活在一个充满垃圾的二维网格世界中,周围有4堵墙(如下图所示)。这个项目的目标是发展一个最佳的控制策略,使他能够有效地捡垃圾,而不是撞墙。
问题图片所示:
涉及方法
任何GA的优化步骤如下:
l 生成问题初始随机解的“种群”
l 个体的“拟合度”是根据它解决问题的程度来评估的
l 最合适的解决方案进行“繁殖”并将“遗传”物质传递给下一代的后代
l 重复第2步和第3步,直到我们得到一组优化的解决方案、
应用的遗传算法代码展示:
在下面的代码中,我们生成一个初始的机器人种群,让自然选择来运行它的过程。我应该提到的是,当然有更快的方法来实现这个算法(例如利用并行化)。
# 初始种群 pop = [Robot() for x in range(pop_size)] results = [] # 执行进化 for i in tqdm(range(num_gen)): scores = np.zeros(pop_size) # 遍历所有机器人 for idx, rob in enumerate(pop): # 运行垃圾收集模拟并计算拟合度 score = rob.simulate(iter_per_sim, moves_per_iter) scores[idx] = score results.append([scores.mean(),scores.max()]) # 保存每一代的平均值和最大值 best_robot = pop[scores.argmax()] # 保存最好的机器人 # 限制那些能够交配的机器人的数量 inds = np.argpartition(scores, -num_breeders)[-num_breeders:] # 基于拟合度得到顶级机器人的索引 subpop = [] for idx in inds: subpop.append(pop[idx]) scores = scores[inds] # 平方并标准化 norm_scores = (scores - scores.min()) ** 2 norm_scores = norm_scores / norm_scores.sum() # 创造下一代机器人 new_pop = [] for child in range(pop_size): # 选择拟合度优秀的父母 p1, p2 = np.random.choice(subpop, p=norm_scores, size=2, replace=False) new_pop.append(Robot(p1.dna, p2.dna)) pop = new_pop
效果展示:

看完了这篇文章,相信你对python中遗传算法优化过程的实例有了一定的了解,想了解更多相关知识,欢迎关注亿速云行业资讯频道,感谢各位的阅读!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





