今天小编给大家分享一下OpenCV如何实现Sobel边缘检测的相关知识点,内容详细,逻辑清晰,相信大部分人都还太了解这方面的知识,所以分享这篇文章给大家参考一下,希望大家阅读完这篇文章后有所收获,下面我们一起来了解一下吧。
Sobel边缘检测算法比较简单,实际应用中效率比canny边缘检测效率要高,但是边缘不如Canny检测的准确,然而在很多实际应用的场合,sobel边缘却是首选,Sobel算子是高斯平滑与微分操作的结合体,所以其抗噪声能力很强,用途较多。尤其是在对效率要求较高,而对细纹理不太关系的时候。
使用Sobel算子提取图像边缘分3个步骤:
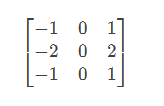
提取X方向的边缘,X方向一阶Sobel边缘检测算法为:
提取Y方向的边缘,Y方向一阶Sobel边缘检测算法为:

综合两个方向的边缘信息得到整幅图像的边缘。
Sobel_x_or_y = cv2.Sobel(src, ddepth, dx, dy, dst, ksize, scale, delta, borderType)src:传入的图像
ddepth:图像的深度
dx、dy:指的是求导的阶数,0表示这个方向上没有求导,所填的数一般为0、1、2。
ksize:是Sobel算子的大小,即卷积核的大小,必须为奇数1、3、5、7。如果ksize=-1,就演变成为3x3的Scharr算子,scale是缩放导数的比例常数,默认情况为没有伸缩系数。
borderType:是判断图像边界的模式,这个参数默认值为cv2.BORDER_DEFAULT。
dst及dst之后的参数都是可选参数。
#include <iostream>
#include <opencv2\opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
//----------------读取图像-----------------
Mat img = imread("1.jpg");
//黑白图像边缘检测结果较为明显
Mat gray_img;
cvtColor(img, gray_img, COLOR_BGR2GRAY);
Mat resultX, resultY, resultXY;
//-------------Sobel边缘检测--------------
//X方向一阶边缘
Sobel(img, resultX, CV_16S, 2, 0, 1);
convertScaleAbs(resultX, resultX);
//Y方向一阶边缘
Sobel(img, resultY, CV_16S, 0, 1, 3);
convertScaleAbs(resultY, resultY);
//整幅图像的一阶边缘
resultXY = resultX + resultY;
//显示图像
imshow("resultX", resultX);
imshow("resultY", resultY);
imshow("resultXY", resultXY);
waitKey(0);
return 0;
}import cv2
img = cv2.imread("1.jpg")
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# -------------------Sobel边缘检测------------------------
x = cv2.Sobel(gray_img, cv2.CV_16S, 1, 0)
y = cv2.Sobel(gray_img, cv2.CV_16S, 0, 1)
# cv2.convertScaleAbs(src[, dst[, alpha[, beta]]])
# 可选参数alpha是伸缩系数,beta是加到结果上的一个值,结果返回uint类型的图像
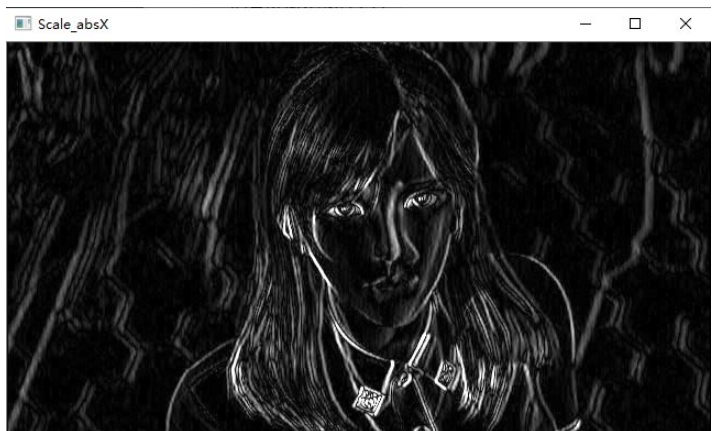
Scale_absX = cv2.convertScaleAbs(x) # convert 转换 scale 缩放
Scale_absY = cv2.convertScaleAbs(y)
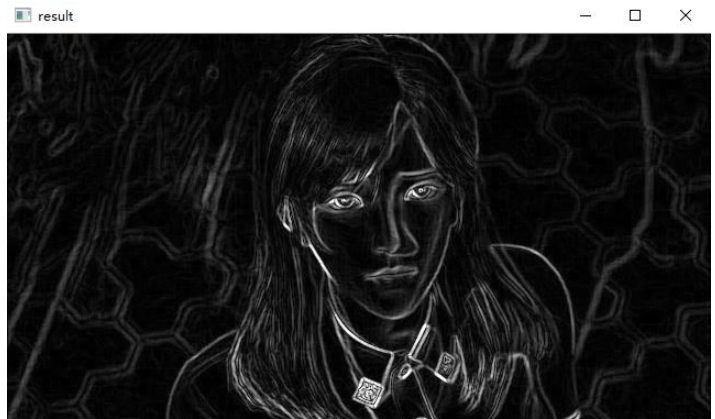
result = cv2.addWeighted(Scale_absX, 0.5, Scale_absY, 0.5, 0)
# ----------------------显示结果----------------------------
cv2.imshow('img', gray_img)
cv2.imshow('Scale_absX', Scale_absX)
cv2.imshow('Scale_absY', Scale_absY)
cv2.imshow('result', result)
cv2.waitKey(0)
cv2.destroyAllWindows()1、灰度图

2、X方向一阶边缘
2、Y方向一阶边缘

3、整幅图像的一阶边缘
以上就是“OpenCV如何实现Sobel边缘检测”这篇文章的所有内容,感谢各位的阅读!相信大家阅读完这篇文章都有很大的收获,小编每天都会为大家更新不同的知识,如果还想学习更多的知识,请关注亿速云行业资讯频道。
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



