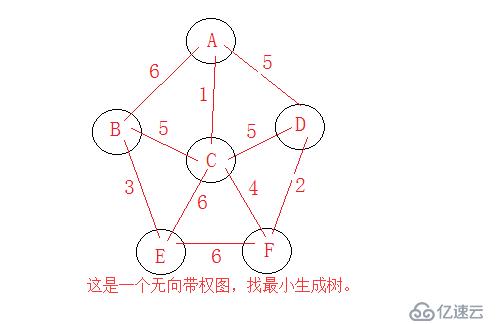
1、最小生成树(MST树)
针对连通图;
(1)、现实意义:在n个城市之间建立通信网络,连通n个城市,只需要n-1条线路;
但是n个城市之间共有 n*(n-1)/2条路线,如何选择n-1条,使我们花费成本最小。
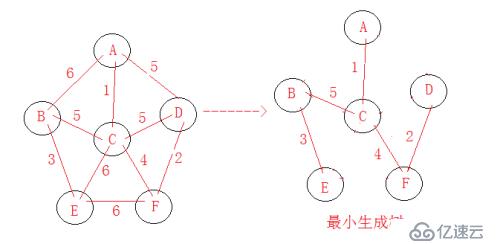
(2)、相同的一个图形结构,有可能产生出不同形状的生成树,但是我们要找的是不同形状生成树里面耗费最小的一棵树;
(3)、研究的问题:怎样从生成树里面找到花费代价最小的一颗,花费最小,成本最低;耗费代价最小的生成树我们就称之为:最小生成树(MST树)。
(4)、最小生成树是不能有环形的;通过不同的方法,最终所找到的最小生成树是相同的(在权值相同时,有可能不一样,但是权值最小是唯一的,肯定的)。
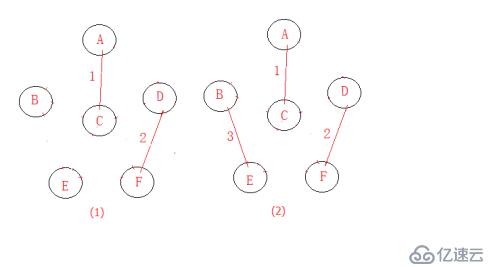
2、Kruskal算法思想
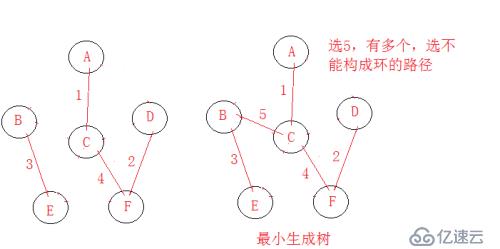
思想:每次找权值最小的边,与顶点关系不大(不关注顶点);
从边的游离角度出发,每次都要找权值路径最小的边,(特别注意看所选的边是否购成回路)
模型分析:
3、Kruskal算法实现
这里找最小代价cost时,采用的是数组(调用系统快排),当然用堆也可以。
均由C++代码实现(用的是邻接矩阵):
typedef struct MstEdge{ //最小生成树的边(弄成一个结构体)
int x; //row
int y; //col
int cost;
}MstEdge;
int cmp(const void *a, const void *b){ //快排比较的方法
return (*(MstEdge*)a).cost - (*(MstEdge*)b).cost;
}
bool isSame(int *father, int i, int j){ //判断是否为回路,就是有相同的父节点
while(father[i] != i){
i = father[i];
}
while(father[j] != j){
j = father[j];
}
return i == j;
}
void markSame(int *father, int i, int j){ //连通之后,标记为有相同的父节点
while(father[i] != i){
i = father[i];
}
while(father[j] != j){
j = father[j];
}
father[j] = i;
}
template<typename Type, typename E>
void GraphMtx<Type, E>::MinSpanTree_Kruskal(){
int n = Graph<Type, E>::getCurVertex(); //由于要用到父类的保护数据或方法,有模板的存在,必须加上作用域限定符;
MstEdge *edge1 = new MstEdge[n*(n-1)/2]; //最小生成树的数组
int k = 0;
for(int i = 0; i < n; i++){
for(int j = i+1; j < n; j++){
if(edge[i][j] != MAX_COST){
edge1[k].x = i;
edge1[k].y = j;
edge1[k].cost = edge[i][j];
k++;
}
}
}
qsort(edge1, k, sizeof(MstEdge), cmp); //调用系统的快排;
int *father = new int[n]; //弄一个父节点
Type v1, v2;
for(i = 0; i < n; i++){
father[i] = i; //自己的父就是自己顶点的下标
}
for(i = 0; i < n; i++){
if(!isSame(father, edge1[i].x, edge1[i].y)){ //父节点不相同
v1 = getValue(edge1[i].x);
v2 = getValue(edge1[i].y);
printf("%c-->%c : %d\n", v1, v2, edge1[i].cost); //找到了最小边和cost
markSame(father, edge1[i].x, edge1[i].y); //标记为相同父节点;
}
}
}4、完整代码、测试代码、测试结果
(1)、完整代码
#ifndef _GRAPH_H_
#define _GRAPH_H_
#include<iostream>
#include<queue>
using namespace std;
#define VERTEX_DEFAULT_SIZE 10
#define MAX_COST 0x7FFFFFFF
template<typename Type, typename E>
class Graph{
public:
bool isEmpty()const{
return curVertices == 0;
}
bool isFull()const{
if(curVertices >= maxVertices || curEdges >= curVertices*(curVertices-1)/2)
return true; //图满有2种情况:(1)、当前顶点数超过了最大顶点数,存放顶点的空间已满
return false; //(2)、当前顶点数并没有满,但是当前顶点所能达到的边数已满
}
int getCurVertex()const{
return curVertices;
}
int getCurEdge()const{
return curEdges;
}
public:
virtual bool insertVertex(const Type &v) = 0; //插入顶点
virtual bool insertEdge(const Type &v1, const Type &v2, E cost) = 0; //插入边
virtual bool removeVertex(const Type &v) = 0; //删除顶点
virtual bool removeEdge(const Type &v1, const Type &v2) = 0; //删除边
virtual int getFirstNeighbor(const Type &v) = 0; //得到第一个相邻顶点
virtual int getNextNeighbor(const Type &v, const Type &w) = 0; //得到下一个相邻顶点
public:
virtual int getVertexIndex(const Type &v)const = 0; //得到顶点下标
virtual void showGraph()const = 0; //显示图
virtual Type getValue(int index)const = 0;
public:
virtual void DFS(const Type &v) = 0;
virtual void BFS(const Type &v) = 0;
protected:
int maxVertices; //最大顶点数
int curVertices; //当前顶点数
int curEdges; //当前边数
};
template<typename Type, typename E>
class GraphMtx : public Graph<Type, E>{ //邻接矩阵继承父类矩阵
#define maxVertices Graph<Type, E>::maxVertices //因为是模板,所以用父类的数据或方法都得加上作用域限定符
#define curVertices Graph<Type, E>::curVertices
#define curEdges Graph<Type, E>::curEdges
public:
GraphMtx(int vertexSize = VERTEX_DEFAULT_SIZE){ //初始化邻接矩阵
maxVertices = vertexSize > VERTEX_DEFAULT_SIZE ? vertexSize : VERTEX_DEFAULT_SIZE;
vertexList = new Type[maxVertices]; //申请顶点空间
for(int i = 0; i < maxVertices; i++){ //都初始化为0
vertexList[i] = 0;
}
edge = new int*[maxVertices]; //申请边的行
for(i = 0; i < maxVertices; i++){ //申请列空间
edge[i] = new int[maxVertices];
}
for(i = 0; i < maxVertices; i++){ //赋初值为0
for(int j = 0; j < maxVertices; j++){
if(i != j){
edge[i][j] = MAX_COST; //初始化时都赋为到其它边要花的代价为无穷大。
}else{
edge[i][j] = 0; //初始化时自己到自己认为花费为0
}
}
}
curVertices = curEdges = 0; //当前顶点和当前边数
}
GraphMtx(Type (*mt)[4], int sz){ //通过已有矩阵的初始化
int e = 0; //统计边数
maxVertices = sz > VERTEX_DEFAULT_SIZE ? sz : VERTEX_DEFAULT_SIZE;
vertexList = new Type[maxVertices]; //申请顶点空间
for(int i = 0; i < maxVertices; i++){ //都初始化为0
vertexList[i] = 0;
}
edge = new int*[maxVertices]; //申请边的行
for(i = 0; i < maxVertices; i++){ //申请列空间
edge[i] = new Type[maxVertices];
}
for(i = 0; i < maxVertices; i++){ //赋初值为矩阵当中的值
for(int j = 0; j < maxVertices; j++){
edge[i][j] = mt[i][j];
if(edge[i][j] != 0){
e++; //统计列的边数
}
}
}
curVertices = sz;
curEdges = e/2;
}
~GraphMtx(){}
public:
bool insertVertex(const Type &v){
if(curVertices >= maxVertices){
return false;
}
vertexList[curVertices++] = v;
return true;
}
bool insertEdge(const Type &v1, const Type &v2, E cost){
int maxEdges = curVertices*(curVertices-1)/2;
if(curEdges >= maxEdges){
return false;
}
int v = getVertexIndex(v1);
int w = getVertexIndex(v2);
if(v==-1 || w==-1){
cout<<"edge no exit"<<endl; //要插入的顶点不存在,无法插入
return false;
}
if(edge[v][w] != MAX_COST){ //当前边已经存在,不能进行插入
return false;
}
edge[v][w] = edge[w][v] = cost; //因为是无向图,对称, 权值赋为cost;
return true;
} //删除顶点的高效方法
bool removeVertex(const Type &v){
int i = getVertexIndex(v);
if(i == -1){
return false;
}
vertexList[i] = vertexList[curVertices-1];
int edgeCount = 0;
for(int k = 0; k < curVertices; k++){
if(edge[i][k] != 0){ //统计删除那行的边数
edgeCount++;
}
}
//删除行
for(int j = 0; j < curVertices; j++){
edge[i][j] = edge[curVertices-1][j];
}
//删除列
for(j = 0; j < curVertices; j++){
edge[j][i] = edge[j][curVertices-1];
}
curVertices--;
curEdges -= edgeCount;
return true;
}
/* //删除顶点用的是数组一个一个移动的方法,效率太低。
bool removeVertex(const Type &v){
int i = getVertexIndex(v);
if(i == -1){
return false;
}
for(int k = i; k < curVertices-1; ++k){
vertexList[k] = vertexList[k+1];
}
int edgeCount = 0;
for(int j = 0; j < curVertices; ++j){
if(edge[i][j] != 0)
edgeCount++;
}
for(int k = i; k < curVertices-1; ++k)
{
for(int j = 0; j < curVertices; ++j)
{
edge[k][j] = edge[k+1][j];
}
}
for(int k = i; k < curVertices-1; ++k)
{
for(int j = 0; j < curVertices; ++j)
{
edge[j][k] = edge[j][k+1];
}
}
curVertices--;
curEdges -= edgeCount;
return true;
}
*/
bool removeEdge(const Type &v1, const Type &v2){
int v = getVertexIndex(v1);
int w = getVertexIndex(v2);
if(v==-1 || w==-1){ //判断要删除的边是否在当前顶点内
return false; //顶点不存在
}
if(edge[v][w] == 0){ //这个边根本不存在,没有必要删
return false;
}
edge[v][w] = edge[w][v] = 0; //删除这个边赋值为0,代表不存在;
curEdges--;
return true;
}
int getFirstNeighbor(const Type &v){
int i = getVertexIndex(v);
if(i == -1){
return -1;
}
for(int col = 0; col < curVertices; col++){
if(edge[i][col] != 0){
return col;
}
}
return -1;
}
int getNextNeighbor(const Type &v, const Type &w){
int i = getVertexIndex(v);
int j = getVertexIndex(w);
if(i==-1 || j==-1){
return -1;
}
for(int col = j+1; col < curVertices; col++){
if(edge[i][col] != 0){
return col;
}
}
return -1;
}
public:
void showGraph()const{
if(curVertices == 0){
cout<<"Nul Graph"<<endl;
return;
}
for(int i = 0; i < curVertices; i++){
cout<<vertexList[i]<<" ";
}
cout<<endl;
for(i = 0; i < curVertices; i++){
for(int j = 0; j < curVertices; j++){
if(edge[i][j] != MAX_COST){
cout<<edge[i][j]<<" ";
}else{
cout<<"@ ";
}
}
cout<<vertexList[i]<<endl;
}
}
int getVertexIndex(const Type &v)const{
for(int i = 0; i < curVertices; i++){
if(vertexList[i] == v){
return i;
}
}
return -1;
}
public:
Type getValue(int index)const{
return vertexList[index];
}
void DFS(const Type &v){
int n = Graph<Type, E>::getCurVertex();
bool *visit = new bool[n];
for(int i = 0; i < n; i++){
visit[i] = false;
}
DFS(v, visit);
delete []visit;
}
void BFS(const Type &v){
int n = Graph<Type, E>::getCurVertex();
bool *visit = new bool[n];
for(int i = 0; i < n; i++){
visit[i] = false;
}
cout<<v<<"-->";
int index = getVertexIndex(v);
visit[index] = true;
queue<int> q; //队列中存放的是顶点下标;
q.push(index);
int w;
while(!q.empty()){
index = q.front();
q.pop();
w = getFirstNeighbor(getValue(index));
while(w != -1){
if(!visit[w]){
cout<<getValue(w)<<"-->";
visit[w] = true;
q.push(w);
}
w = getNextNeighbor(getValue(index), getValue(w));
}
}
delete []visit;
}
public:
void MinSpanTree_Kruskal();
protected:
void DFS(const Type &v, bool *visit){
cout<<v<<"-->";
int index = getVertexIndex(v);
visit[index] = true;
int w = getFirstNeighbor(v);
while(w != -1){
if(!visit[w]){
DFS(getValue(w), visit);
}
w = getNextNeighbor(v, getValue(w));
}
}
private:
Type *vertexList; //存放顶点的数组
int **edge; //存放边关系的矩阵
};
//////////////////////////////////////////////////////////////////////////////////////////////////////
typedef struct MstEdge{
int x; //row
int y; //col
int cost;
}MstEdge;
int cmp(const void *a, const void *b){
return (*(MstEdge*)a).cost - (*(MstEdge*)b).cost;
}
bool isSame(int *father, int i, int j){
while(father[i] != i){
i = father[i];
}
while(father[j] != j){
j = father[j];
}
return i == j;
}
void markSame(int *father, int i, int j){
while(father[i] != i){
i = father[i];
}
while(father[j] != j){
j = father[j];
}
father[j] = i;
}
template<typename Type, typename E>
void GraphMtx<Type, E>::MinSpanTree_Kruskal(){
int n = Graph<Type, E>::getCurVertex(); //由于要用到父类的保护数据或方法,有模板的存在,必须加上作用域限定符;
MstEdge *edge1 = new MstEdge[n*(n-1)/2];
int k = 0;
for(int i = 0; i < n; i++){
for(int j = i+1; j < n; j++){
if(edge[i][j] != MAX_COST){
edge1[k].x = i;
edge1[k].y = j;
edge1[k].cost = edge[i][j];
k++;
}
}
}
qsort(edge1, k, sizeof(MstEdge), cmp);
int *father = new int[n];
Type v1, v2;
for(i = 0; i < n; i++){
father[i] = i;
}
for(i = 0; i < n; i++){
if(!isSame(father, edge1[i].x, edge1[i].y)){
v1 = getValue(edge1[i].x);
v2 = getValue(edge1[i].y);
printf("%c-->%c : %d\n", v1, v2, edge1[i].cost);
markSame(father, edge1[i].x, edge1[i].y);
}
}
}
#endif(2)、测试代码
#include"Graph2.h"
int main(void){
GraphMtx<char,int> gm;
gm.insertVertex('A'); //0
gm.insertVertex('B'); //1
gm.insertVertex('C'); //2
gm.insertVertex('D'); //3
gm.insertVertex('E'); //4
gm.insertVertex('F'); //5
gm.insertEdge('A','B',6);
gm.insertEdge('A','C',1);
gm.insertEdge('A','D',5);
gm.insertEdge('B','C',5);
gm.insertEdge('B','E',3);
gm.insertEdge('C','E',6);
gm.insertEdge('C','D',5);
gm.insertEdge('C','F',4);
gm.insertEdge('D','F',2);
gm.insertEdge('E','F',6);
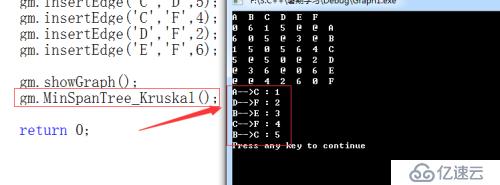
gm.showGraph();
gm.MinSpanTree_Kruskal();
return 0;
}(3)、测试结果
测试图模型
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



