今天小编给大家分享的是使用C++如何实现PatchMatch图像修复算法,相信很多人都不太了解,为了让大家更加了解,所以给大家总结了以下内容,一起往下看吧。一定会有所收获的哦。
PatchMatch算法出自Barnes的论文
PatchMatch: A Randomized Correspondence Algorithm for Structural Image Editing
PatchMatch 算法就是一个找近似最近邻(Approximate Nearest neigbhor)的方法,要比其他ANN算法快上10倍+。
将下面的图理解了,就基本理解了整个算法。

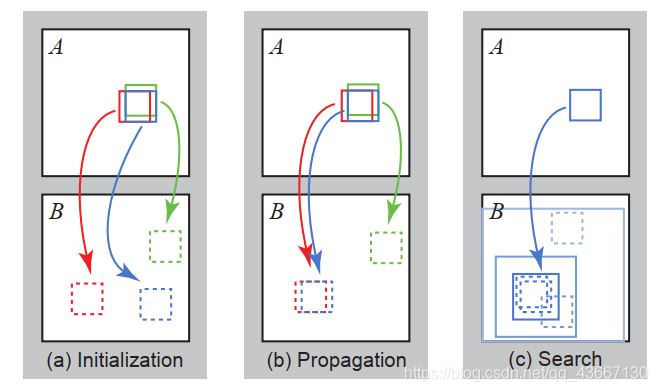
看上图时,我们以蓝色为主颜色。A代表原图像,矩形框代表待修复的patch块,要修复patch_A块就需要在B(也是原图)中搜索一个最合适的块patch_B,而从patch_A到patch_B的偏移量,就是上图箭头,也就是offset。
蓝色为主patch块,红色是蓝色向左移一个像素,绿色是蓝色向上移一个像素。
上图 (a):随机初始化 (b):传播 ©:随机扰动搜索
PatchMatch 的核心思想是利用图像的连续性(consistence), 一个图像A的patch_A(蓝色)附近的Patch块(红色绿色)的最近邻(B中的红色绿色框)最有可能出现在Patch_A的最近邻(B中的蓝色框)附近,利用这种图像的连续性大量减少搜索的范围,通过迭代的方式保证大多数点能尽快收敛。
PatchMatch算法是对所有待修复像素迭代修复的,而不是像Criminisi或FMM算法对待修复区域像素优先级排序后进行渐进修复的。
首先是建立图像的下采样金字塔模型,代码中设定为五层,建立模型后
对A的待修复区域每个patch块随机在B已知区域中匹配一个patch块,即初始化偏置地图(上图a步骤)。
/*********************************
函数声明:初始化偏置图像
参数:NONE
注释:NONE
测试:NONE
**********************************/
void PatchMatch::InitOff(Mat Mask, Mat &Off)
{
//为方便起见,将所有的都附上,要求不能赋值到非搜索区域
//初始化格式
Off = Mat(Mask.size(), CV_32FC2, Scalar::all(0));//2维无符号32位精度浮点数
for (int i = 0; i < Mask.rows; i++)
{
for (int j = 0; j < Mask.cols; j++)
{
//不考虑search区域,没有破损,他们的最佳偏移向量当然是0,自己
if (Mask.at<uchar>(i, j) == search)
{
Off.at<Vec2f>(i, j)[0] = 0; //<Vec2f> 向量,2维,浮点数
Off.at<Vec2f>(i, j)[1] = 0;
}
else//处理hole,采用随机偏置
{
//先初始化2个偏置数r_col,r_row
int r_col = rand() % Mask.cols; //rand()产生随机数,主要是产生一个偏置的初始值
int r_row = rand() % Mask.rows;
r_col = r_col + j < Mask.cols ? r_col : r_col - Mask.cols;//边界检测
r_row = r_row + i < Mask.rows ? r_row : r_row - Mask.rows;
//为什么要有这个循环?因为一次的随机赋值,很可能会出现偏置后的块跑到破损区域,或者是超出限定搜索框的边界
while (
!(Mask.at<uchar>(r_row + i, r_col + j) == search //这里加上I,j,是因为他是A投影到B中的搜索偏置
&& abs(r_row) < searchrowratio*Mask.rows)) //searchrowratio=0.5,搜索的时候,确保r_row偏置不会太远,一定是在原图像的大小里
{
r_col = rand() % Mask.cols;
r_row = rand() % Mask.rows;
//边界检测
r_col = r_col + j < Mask.cols ? r_col : r_col - Mask.cols;
r_row = r_row + i < Mask.rows ? r_row : r_row - Mask.rows;
}
//赋偏置值
Off.at<Vec2f>(i, j)[0] = r_row;
Off.at<Vec2f>(i, j)[1] = r_col;
}
}
}
}之后从低分辨率开始,对于每一层金字塔模型进行迭代:
每一次迭代都会遍历原图A待修复区域所有像素。当遍历到当前像素时,执行下面的步骤来进行修复:
传播会计算原图A当前像素块patch_A(蓝色)对应的B中的patch_B_1,patch_A上方(绿色)(奇数次迭代为下方)对应的B中的patch_B_2,patch_A左侧(红色)(奇数次迭代为右侧)对应的B中的patch_B_3这三个patch块中与patch_A相似度最高的patch块。
计算相似度函数为
//以块为单位,用所有像素点的相同颜色通道的差平方来简单判断相似度
float PatchMatch::Distance(Mat Dst, Mat Src)
{
float distance = 0;
for (int i = 0; i < Dst.rows; i++)
{
for (int j = 0; j < Dst.cols; j++)
{
for (int k = 0; k < 3; k++)//K=3个颜色通道
{
int tem = Src.at < Vec3b >(i, j)[k] - Dst.at < Vec3b >(i, j)[k];
distance += tem * tem;//差平方
}
}
}
return distance;
}传播函数:
//迭代第一步:传播
//(now_row, now_col):patch里的像素
//odd:当前迭代次
void PatchMatch::Propagation(Mat Dst, Mat Src, Mat Mask, Mat &Off, int row, int col,int odd)
{
Mat DstPatch = GetPatch(Dst, row, col);//获取长度为 patchsize = 3 的边界框, (row, col)代表的是中心像素点坐标
if (odd % 2 == 0)//偶次迭代
{
//提取(row, col)的match块
Mat SrcPatch = GetPatch(Src, row + Off.at < Vec2f >(row, col)[0],
col + Off.at < Vec2f >(row, col)[1]);
//提取(row, col-1)的match块
Mat LSrcPatch = GetPatch(Src, row + Off.at < Vec2f >(row, col - 1)[0],
col - 1 + Off.at < Vec2f >(row, col - 1)[1]);
//提取(row-1, col)的match块
Mat USrcPatch = GetPatch(Src,
row - 1 + Off.at < Vec2f >(row - 1, col)[0],
col + Off.at < Vec2f >(row - 1, col)[1]);
//返回上面4个块最相似的块的代表数字,用于switch判断
int location = GetMinPatch2(DstPatch, SrcPatch, LSrcPatch, USrcPatch);
//利用上面的信息更新像素点的偏置地图
switch (location)
{
//若是1则不更新
case 2:
Off.at < Vec2f >(row, col)[0] = Off.at < Vec2f >(row, col - 1)[0];
Off.at < Vec2f >(row, col)[1] = Off.at < Vec2f >(row, col - 1)[1] - 1;
break;
case 3:
Off.at < Vec2f >(row, col)[0] = Off.at < Vec2f >(row - 1, col)[0] - 1;
Off.at < Vec2f >(row, col)[1] = Off.at < Vec2f >(row - 1, col)[1];
break;
}
}
else//奇数次迭代
{
Mat SrcPatch = GetPatch(Src, row + Off.at < Vec2f >(row, col)[0],
col + Off.at < Vec2f >(row, col)[1]);
Mat RSrcPatch = GetPatch(Src, row + Off.at < Vec2f >(row, col + 1)[0],
col + 1 + Off.at < Vec2f >(row, col + 1)[1]);
Mat DSrcPatch = GetPatch(Src,
row + 1 + Off.at < Vec2f >(row + 1, col)[0],
col + Off.at < Vec2f >(row + 1, col)[1]);
int location = GetMinPatch2(DstPatch, SrcPatch, RSrcPatch, DSrcPatch);
switch (location)
{
case 2:
Off.at < Vec2f >(row, col)[0] = Off.at < Vec2f >(row, col + 1)[0];
Off.at < Vec2f >(row, col)[1] = Off.at < Vec2f
>(row, col + 1)[1] + 1;
break;
case 3:
Off.at < Vec2f >(row, col)[0] = Off.at < Vec2f
>(row + 1, col)[0] + 1;
Off.at < Vec2f >(row, col)[1] = Off.at < Vec2f >(row + 1, col)[1];
break;
}
}
}为了避免陷入局部极值,再额外再随机生成几个patch位置作为候选patch块,若小于当前patch,则更新。
随机扰动会在原图A中,以当前像素为中心点,初始半径区域为全图,在此区域内随机找寻patch块并与patch_A原本对应的B中的patch块对比,若更相似则更新对应关系offset,然后以新的patch_B为中心,半径缩小一倍,继续搜索,直到半径缩小为1,更新完毕。
//迭代第二步:随机搜索
//(row,col)=(now_row, now_col):修复patch里的像素
void PatchMatch::RandomSearch(Mat Dst, Mat Src, Mat Mask, Mat &Off, int row, int col)
{
Mat DstPatch = GetPatch(Dst, row, col);//获取修复基准框,在框内操作
//迭代指数
int attenuate = 0;
while (true)
{
//获取随机参数,在 [-1;1] 间
float divcol = rand() % 2000 / 1000.0f - 1.0f;
float divrow = rand() % 2000 / 1000.0f - 1.0f;
//减小框大小的公式,?_?=?_0+?*?^?*?_?
//行列分别处理,MaxWindow:原始框宽度;divcol:随机系数;pow(A,B):A的B次方。随迭代次数而变小的缩小系数;RandomAttenuation=0.5;
float veccol = MaxWindow * pow(RandomAttenuation, attenuate)* divcol;
float vecrow = MaxWindow * pow(RandomAttenuation, attenuate)* divrow;
float length = sqrt(veccol * veccol + vecrow * vecrow);
//如果低于1个像素,没有意义,直接结束整个循环,对下一个像素处理
if (length < 1)
break;
//x方向,前2项指向(row, col)的match块,后面是公式的后一项
int nowrow = row + Off.at < Vec2f >(row, col)[0] + vecrow;
//y方向
int nowcol = col + Off.at < Vec2f >(row, col)[1] + veccol;
//判断随机搜索的patch不越界,在search内
if (nowcol >= 0 && nowcol <= Off.cols - 1 && nowrow >= 0
&& nowrow <= Off.rows - 1
&& Mask.at < uchar >(nowrow, nowcol) == search
&& abs(nowrow - row) < searchrowratio * Mask.rows)//abs:绝对值
{
//取出原来的match块
Mat SrcPatch2 = GetPatch(Src, Off.at < Vec2f >(row, col)[0] + row,
Off.at < Vec2f >(row, col)[1] + col);
//取出现在的随机match块
Mat SrcPatch3 = GetPatch(Src, nowrow, nowcol);
//对比相似性,找出最好的块
int location = GetMinPatch3(DstPatch, SrcPatch2, SrcPatch3);
//结合最好的相似块给像素新的偏置值
switch (location)
{
case 2:
Off.at < Vec2f >(row, col)[1] = nowcol - col;
Off.at < Vec2f >(row, col)[0] = nowrow - row;
break;
}
}
//迭代指数增加
attenuate++;
}
}经过该两个步骤,本次迭代完毕。
当最终迭代完成后,就完成了整个修复过程。
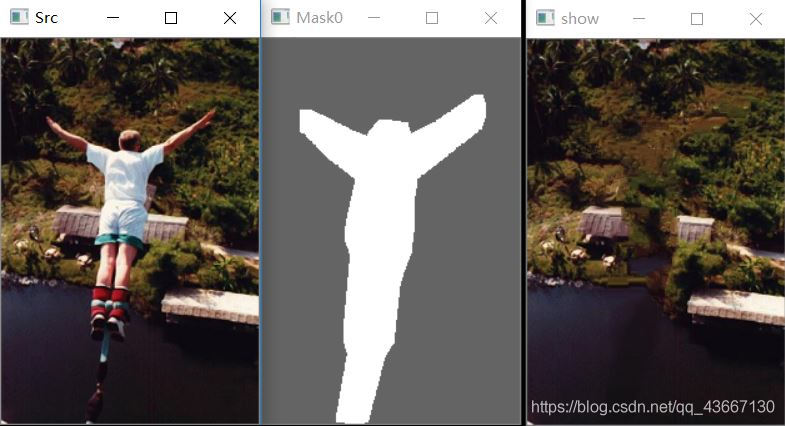
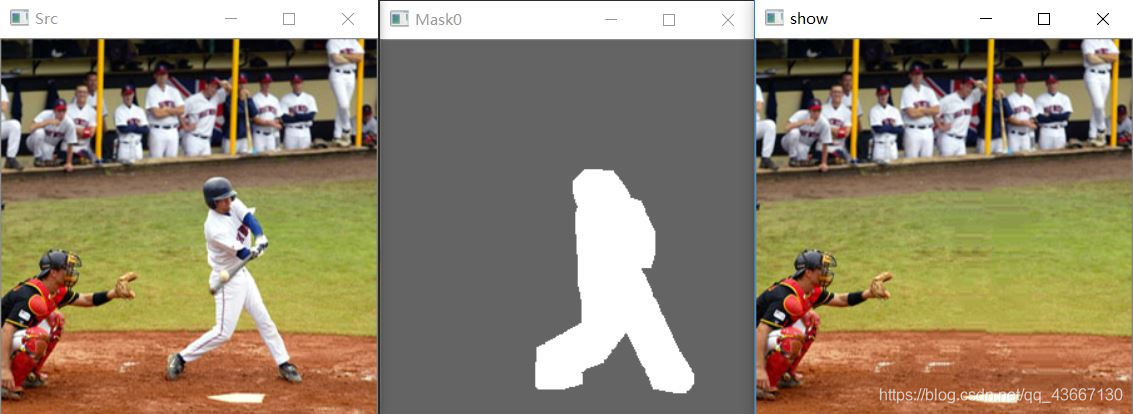
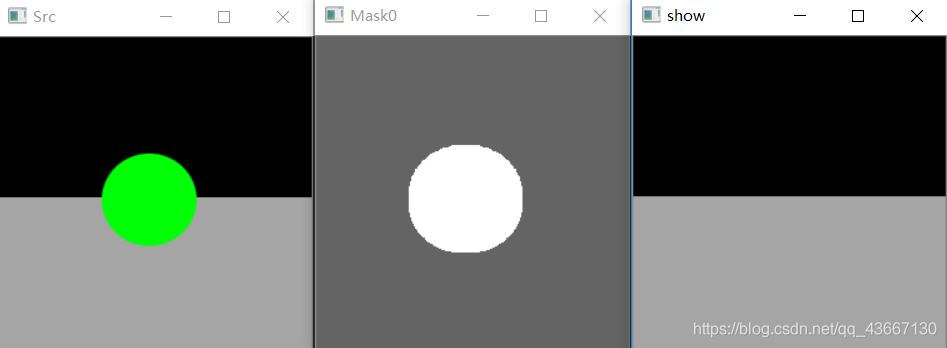
可以看到效果还是可以的,速度也比较快。
关于使用C++如何实现PatchMatch图像修复算法就分享到这里了,希望以上内容可以对大家有一定的参考价值,可以学以致用。如果喜欢本篇文章,不妨把它分享出去让更多的人看到。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





