pythonдёүиҫ№жөӢйҮҸе®ҡдҪҚжҖҺд№Ҳе®һзҺ°
иҝҷзҜҮж–Үз« з»ҷеӨ§е®¶еҲҶдә«зҡ„жҳҜжңүе…іpythonдёүиҫ№жөӢйҮҸе®ҡдҪҚжҖҺд№Ҳе®һзҺ°зҡ„еҶ…е®№гҖӮе°Ҹзј–и§үеҫ—жҢәе®һз”Ёзҡ„пјҢеӣ жӯӨеҲҶдә«з»ҷеӨ§е®¶еҒҡдёӘеҸӮиҖғпјҢдёҖиө·и·ҹйҡҸе°Ҹзј–иҝҮжқҘзңӢзңӢеҗ§гҖӮ
pythonдё»иҰҒеә”з”ЁйўҶеҹҹжңүе“Әдәӣ
1гҖҒдә‘и®Ўз®—пјҢе…ёеһӢеә”з”ЁOpenStackгҖӮ2гҖҒWEBеүҚз«ҜејҖеҸ‘пјҢдј—еӨҡеӨ§еһӢзҪ‘з«ҷеқҮдёәPythonејҖеҸ‘гҖӮ3.дәәе·ҘжҷәиғҪеә”з”ЁпјҢеҹәдәҺеӨ§ж•°жҚ®еҲҶжһҗе’Ңж·ұеәҰеӯҰд№ иҖҢеҸ‘еұ•еҮәжқҘзҡ„дәәе·ҘжҷәиғҪжң¬иҙЁдёҠе·Із»Ҹж— жі•зҰ»ејҖpythonгҖӮ4гҖҒзі»з»ҹиҝҗз»ҙе·ҘзЁӢйЎ№зӣ®пјҢиҮӘеҠЁеҢ–иҝҗз»ҙзҡ„ж Үй…Қе°ұжҳҜpython+Django/flaskгҖӮ5гҖҒйҮ‘иһҚзҗҶиҙўеҲҶжһҗпјҢйҮҸеҢ–дәӨжҳ“пјҢйҮ‘иһҚеҲҶжһҗгҖӮ6гҖҒеӨ§ж•°жҚ®еҲҶжһҗгҖӮ
е®ҡдҪҚеҺҹзҗҶеҫҲз®ҖеҚ•пјҢж•…дёҚиөҳиҝ°пјҢзӣҙжҺҘдёҠжәҗз ҒпјҢеҶ…йҷ„жіЁйҮҠгҖӮ
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Wed May 16 10:50:29 2018
@author: dag
"""
import sympy
import numpy as np
import math
from matplotlib.pyplot import plot
from matplotlib.pyplot import show
import matplotlib.pyplot as plt
import matplotlib
#и§ЈеҶіж— жі•жҳҫзӨәдёӯж–Үй—®йўҳпјҢfnameжҳҜеҠ иҪҪеӯ—дҪ“и·Ҝеҫ„пјҢж №жҚ®иҮӘиә«pcе®һйҷ…зЎ®е®ҡпјҢе…·дҪ“иҜ·зҷҫеәҰ
zhfont1 = matplotlib.font_manager.FontProperties(fname='/System/Library/Fonts/Hiragino Sans GB W3.ttc')
#йҡҸжңәдә§з”ҹ3дёӘеҸӮиҖғиҠӮзӮ№еқҗж Ү
maxy = 1000
maxx = 1000
cx = maxx*np.random.rand(3)
cy = maxy*np.random.rand(3)
dot1 = plot(cx,cy,'k^')
#з”ҹжҲҗзӣІиҠӮзӮ№пјҢд»ҘеҸҠе…¶дёҺеҸӮиҖғиҠӮзӮ№ж¬§ејҸи·қзҰ»
mtx = maxx*np.random.rand()
mty = maxy*np.random.rand()
plt.hold('on')
dot2 = plot(mtx,mty,'go')
da = math.sqrt(np.square(mtx-cx[0])+np.square(mty-cy[0]))
db = math.sqrt(np.square(mtx-cx[1])+np.square(mty-cy[1]))
dc = math.sqrt(np.square(mtx-cx[2])+np.square(mty-cy[2]))
#и®Ўз®—е®ҡдҪҚеқҗж Ү
def triposition(xa,ya,da,xb,yb,db,xc,yc,dc):
x,y = sympy.symbols('x y')
f1 = 2*x*(xa-xc)+np.square(xc)-np.square(xa)+2*y*(ya-yc)+np.square(yc)-np.square(ya)-(np.square(dc)-np.square(da))
f2 = 2*x*(xb-xc)+np.square(xc)-np.square(xb)+2*y*(yb-yc)+np.square(yc)-np.square(yb)-(np.square(dc)-np.square(db))
result = sympy.solve([f1,f2],[x,y])
locx,locy = result[x],result[y]
return [locx,locy]
#и§Јз®—еҫ—еҲ°е®ҡдҪҚиҠӮзӮ№еқҗж Ү
[locx,locy] = triposition(cx[0],cy[0],da,cx[1],cy[1],db,cx[2],cy[2],dc)
plt.hold('on')
dot3 = plot(locx,locy,'r*')
#жҳҫзӨәи„ҡжіЁ
x = [[locx,cx[0]],[locx,cx[1]],[locx,cx[2]]]
y = [[locy,cy[0]],[locy,cy[1]],[locy,cy[2]]]
for i in range(len(x)):
plt.plot(x[i],y[i],linestyle = '--',color ='g' )
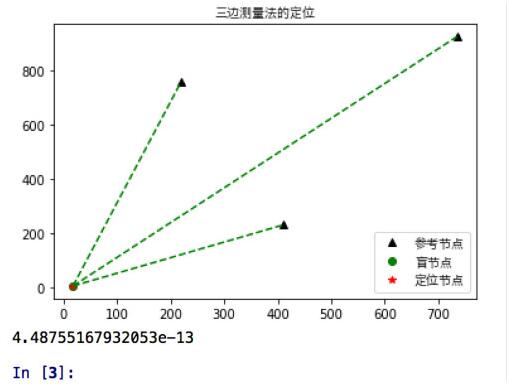
plt.title('дёүиҫ№жөӢйҮҸжі•зҡ„е®ҡдҪҚ',fontproperties=zhfont1)
plt.legend(['еҸӮиҖғиҠӮзӮ№','зӣІиҠӮзӮ№','е®ҡдҪҚиҠӮзӮ№'], loc='lower right',prop=zhfont1)
show()
derror = math.sqrt(np.square(locx-mtx) + np.square(locy-mty))
print(derror)иҫ“еҮәж•Ҳжһңеӣҫпјҡ
иЎҘе……пјҡpython opencvе®һзҺ°дёүи§’жөӢйҮҸпјҲtriangulationпјү
зңӢд»Јз Ғеҗ§~
import cv2
import numpy as np
import scipy.io as scio
if __name__ == '__main__':
print("main function.")
#йӘҢиҜҒзӮ№
point = np.array([1.0 ,2.0, 3.0])
#иҺ·еҸ–зӣёжңәеҸӮж•°
cams_data = scio.loadmat('/data1/dy/SuperSMPL/data/AMAfMvS_Dataset/cameras_I_crane.mat')
Pmats = cams_data['Pmats'] # Pmats(8, 3, 4) жҠ•еҪұзҹ©йҳө
P1 = Pmats[0,::]
P3 = Pmats[2,::]
#йҖҡиҝҮжҠ•еҪұзҹ©йҳөе°ҶзӮ№д»Һдё–з•Ңеқҗж ҮжҠ•еҲ°еғҸзҙ еқҗж Ү
pj1 = np.dot(P1, np.vstack([point.reshape(3,1),np.array([1])]))
pj3 = np.dot(P3, np.vstack([point.reshape(3,1),np.array([1])]))
point1 = pj1[:2,:]/pj1[2,:]#дёӨиЎҢдёҖеҲ—пјҢйҪҗж¬Ўеқҗж ҮиҪ¬еҢ–
point3 = pj3[:2,:]/pj3[2,:]
#еҲ©з”ЁжҠ•еҪұзҹ©йҳөд»ҘеҸҠеҜ№еә”еғҸзҙ зӮ№пјҢиҝӣиЎҢдёүи§’жөӢйҮҸ
points = cv2.triangulatePoints(P1,P3,point1,point3)
#йҪҗж¬Ўеқҗж ҮиҪ¬еҢ–并иҫ“еҮә
print(points[0:3,:]/points[3,:])ж„ҹи°ўеҗ„дҪҚзҡ„йҳ…иҜ»пјҒе…ідәҺвҖңpythonдёүиҫ№жөӢйҮҸе®ҡдҪҚжҖҺд№Ҳе®һзҺ°вҖқиҝҷзҜҮж–Үз« е°ұеҲҶдә«еҲ°иҝҷйҮҢдәҶпјҢеёҢжңӣд»ҘдёҠеҶ…е®№еҸҜд»ҘеҜ№еӨ§е®¶жңүдёҖе®ҡзҡ„её®еҠ©пјҢи®©еӨ§е®¶еҸҜд»ҘеӯҰеҲ°жӣҙеӨҡзҹҘиҜҶпјҢеҰӮжһңи§үеҫ—ж–Үз« дёҚй”ҷпјҢеҸҜд»ҘжҠҠе®ғеҲҶдә«еҮәеҺ»и®©жӣҙеӨҡзҡ„дәәзңӢеҲ°еҗ§пјҒ





