ServerSuperIOеҰӮдҪ•еҪўжҲҗеӣһи·ҜжҺ§еҲ¶
иҝҷзҜҮж–Үз« дё»иҰҒд»Ӣз»ҚвҖңServerSuperIOеҰӮдҪ•еҪўжҲҗеӣһи·ҜжҺ§еҲ¶вҖқпјҢеңЁж—Ҙеёёж“ҚдҪңдёӯпјҢзӣёдҝЎеҫҲеӨҡдәәеңЁServerSuperIOеҰӮдҪ•еҪўжҲҗеӣһи·ҜжҺ§еҲ¶й—®йўҳдёҠеӯҳеңЁз–‘жғ‘пјҢе°Ҹзј–жҹҘйҳ…дәҶеҗ„ејҸиө„ж–ҷпјҢж•ҙзҗҶеҮәз®ҖеҚ•еҘҪз”Ёзҡ„ж“ҚдҪңж–№жі•пјҢеёҢжңӣеҜ№еӨ§е®¶и§Јзӯ”вҖқServerSuperIOеҰӮдҪ•еҪўжҲҗеӣһи·ҜжҺ§еҲ¶вҖқзҡ„з–‘жғ‘жңүжүҖеё®еҠ©пјҒжҺҘдёӢжқҘпјҢиҜ·и·ҹзқҖе°Ҹзј–дёҖиө·жқҘеӯҰд№ еҗ§пјҒ
21.1 жҰӮиҝ°
ServerSuperIOд»ҘеүҚжүҖеҒҡзҡ„е·ҘдҪңйҖҗжӯҘдёәеҪўжҲҗеӣһи·ҜжҺ§еҲ¶жҲ–зә§иҒ”жҺ§еҲ¶жү“дёӢеҹәзЎҖпјҢдҫӢеҰӮпјҡжңҚеҠЎиҝһжҺҘеҷЁе’Ңи®ҫеӨҮй©ұеҠЁиҝһжҺҘеҷЁзҡ„ејҖеҸ‘дёҺеә”з”ЁгҖӮжҖ»д№ӢпјҢжҳҜйҖҡиҝҮеӨҡз§ҚеҪўејҸдёӢеҸ‘е‘Ҫд»ӨжҺ§еҲ¶и®ҫеӨҮпјҲй©ұеҠЁпјүжҲ–дј ж„ҹеҷЁпјҢдә‘з«ҜжҺ§еҲ¶з«ҷзӮ№жҲ–зӣ‘жөӢзӮ№зҡ„дј ж„ҹеҷЁгҖҒAppжҲ–иҖ…е…¶д»–з»Ҳз«ҜжҺ§еҲ¶дј ж„ҹеҷЁгҖҒж №жҚ®дј ж„ҹеҷЁзҡ„йҮҮйӣҶж•°жҚ®жҺ§еҲ¶еҸҰдёҖдёӘдј ж„ҹеҷЁзӯүгҖӮ
дёӢйқўд»Ӣз»Қдә‘з«ҜгҖҒAppжҲ–иҖ…е…¶д»–з»Ҳз«ҜеҰӮдҪ•жҺ§еҲ¶дј ж„ҹеҷЁи®ҫеӨҮпјҲдј ж„ҹеҷЁжҺ§еҲ¶дј ж„ҹеҷЁзұ»дјјпјҢиҜ·еҸӮи§Ғпјҡ12.жңҚеҠЎжҺҘеҸЈзҡ„ејҖеҸ‘пјҢд»ҘеҸҠдёҺдә‘з«ҜеҸҢеҗ‘дәӨдә’пјүгҖӮж №жҚ®йҖҡи®ҜеҚҸи®®пјҢз»“жһ„еҢ–ж–№жЎҲгҖҒдёҚйңҖиҰҒеӨӘеӨҡд»Јз ҒеҚіеҸҜе®ҢжҲҗзӣёеә”зҡ„еҠҹиғҪгҖӮж•ҲжһңеҰӮдёӢеӣҫпјҡ
21.2 з»“жһ„зӨәж„Ҹеӣҫ
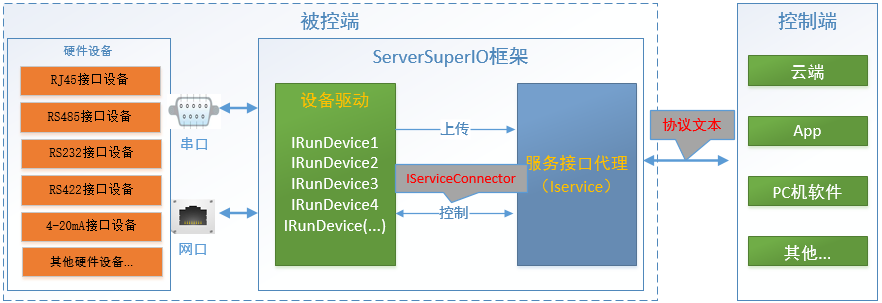
жҺ§еҲ¶з«ҜеҸ‘иө·жҺ§еҲ¶е‘Ҫд»ӨпјҢз”ЁServerSuperIOжңҚеҠЎжҺҘеҸЈејҖеҸ‘дёҖдёӘз®ҖеҚ•зҡ„д»ЈзҗҶжңҚеҠЎпјҢйҖҡиҝҮжңҚеҠЎиҝһжҺҘеҷЁIServiceConnectorжҺҘеҸЈдёҺи®ҫеӨҮй©ұеҠЁиҝӣиЎҢдәӨдә’пјҢи®ҫеӨҮй©ұеҠЁжҺҘ收еҲ°жҺ§еҲ¶е‘Ҫд»ӨеҗҺдёӢеҸ‘з»ҷи®ҫеӨҮжҲ–дј ж„ҹеҷЁпјҢзӯүеҫ…жҺ§еҲ¶иҝ”еӣһзҡ„зЎ®и®Өж¶ҲжҒҜпјҢеҶҚеҺҹи·Ҝиҝ”еӣһз»ҷжҺ§еҲ¶з«ҜгҖӮ
21.3 йҖҡи®ҜеҚҸи®®
жңүдәәй—®дёәд»Җд№ҲдёҚдҪҝз”ЁMQTTеҚҸи®®пјҢйӮЈеҰӮдҪ•е…је®№дёҚеҗҢи®ҫеӨҮе’Ңдј ж„ҹеҷЁзҡ„еҚҸи®®пјҹд»ҘдәҺдёӯеӣҪзҺ°е®һжғ…еҶөпјҢжҳҫ然иҝҳдёҚиғҪиҫҫеҲ°з»ҹдёҖж ҮеҮҶзҡ„ж°ҙе№іпјҢеңЁз»ҸжөҺдёҚеҘҪзҡ„жғ…еҶөдёӢпјҢдјҒдёҡд№ҹдёҚеҸҜиғҪжҠ•иө„жӣҝжҚўжҺүеҺҹжқҘзҡ„硬件и®ҫеӨҮгҖӮд№ҹдёҚз¬ҰеҗҲServerSuperIOи®ҫи®Ўзҡ„еҺҹеҲҷпјҢе°ұжҳҜиҰҒжҗһеҚҸи®®ж— е…іжҖ§пјҢд»»дҪ•ж ҮеҮҶжҲ–йқһж ҮеҮҶзҡ„еҚҸи®®йғҪеҸҜд»ҘйӣҶжҲҗиҝӣжқҘгҖӮеҰӮжһңжғіиҝҮдёҖжқЎжІіпјҢжҠҠжЎҘдҝ®еҘҪгҖҒжҠҠзҙўйҒ“жҗӯеҘҪгҖҒжҠҠиҲ№ж‘ҶеҘҪвҖҰе…·дҪ“жҖҺд№ҲиҝҮжІіз”ұдҪ иҮӘе·ұеҶіе®ҡгҖӮ
жңүдәәй—®ServerSuperIOйғҪйӣҶжҲҗдәҶд»Җд№ҲеҚҸи®®пјҹдёҠйқўе·Із»Ҹз»ҷеҮәдәҶзӯ”жЎҲпјҢеҸҰеӨ–жҲ‘жғіиҜҙзҡ„жҳҜжІЎжңүд»»дҪ•дёҖдёӘжЎҶжһ¶еҸҜд»ҘеҢ…жІ»зҷҫз—…гҖӮд»ҺзӣёеҸҚзҡ„и§’еәҰжқҘиҖғиҷ‘пјҢеҰӮжһңеғҸз»„жҖҒдёҖж ·жҠҠд»»дҪ•еҚҸи®®йғҪеҠ иҝӣжқҘпјҢдјҒдёҡеҸҲжғіжӢҝеҮәжқҘеӨҡе°‘зҡ„д»·еҖјжқҘеҜ№зӯүдәӨжҚўе‘ўпјҢжүҖд»ҘеҚҸи®®й©ұеҠЁиҝҳжҳҜдәӨз»ҷеӨ§е®¶жқҘиҮӘе·ұеҶҷеҗ§гҖӮ
жҲ‘们演зӨәзҡ„еҚҸи®®еҰӮдёӢеӣҫпјҡ

21.4 жҺ§еҲ¶з«Ҝ
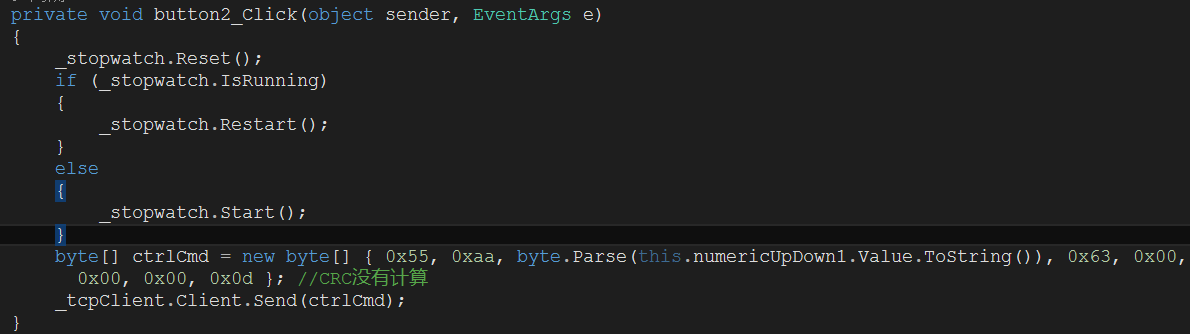
жҺ§еҲ¶з«ҜеҢ…жӢ¬еҫҲеӨҡз§Қпјҡдә‘з«Ҝеҗ‘дёӢзә§еҸ‘йҖҒжҺ§еҲ¶е‘Ҫд»ӨгҖҒAppжҲ–PcжңәиҪҜ件иҝһжҺҘжңҚеҠЎеҸ‘йҖҒжҺ§еҲ¶е‘Ҫд»ӨзӯүзӯүгҖӮеҸ‘йҖҒжҺ§еҲ¶е‘Ҫд»ӨеҰӮдёӢеӣҫпјҡ
21.5 д»ЈзҗҶжңҚеҠЎпјҲSSIOжңҚеҠЎжҺҘеҸЈпјү
д»ЈзҗҶжңҚеҠЎжҳҜйҖҡиҝҮServerSuperIOзҡ„IServiceжҺҘеҸЈе®һзҺ°пјҢеңЁз»§жүҝзұ»дёӯдҪҝз”ЁServerSuperIOжЎҶжһ¶жң¬иә«зҡ„еҚ•дҫӢжЁЎејҸејҖеҸ‘д»ЈзҗҶжңҚеҠЎпјҢд»Јз ҒеҰӮдёӢпјҡ
+ View Code
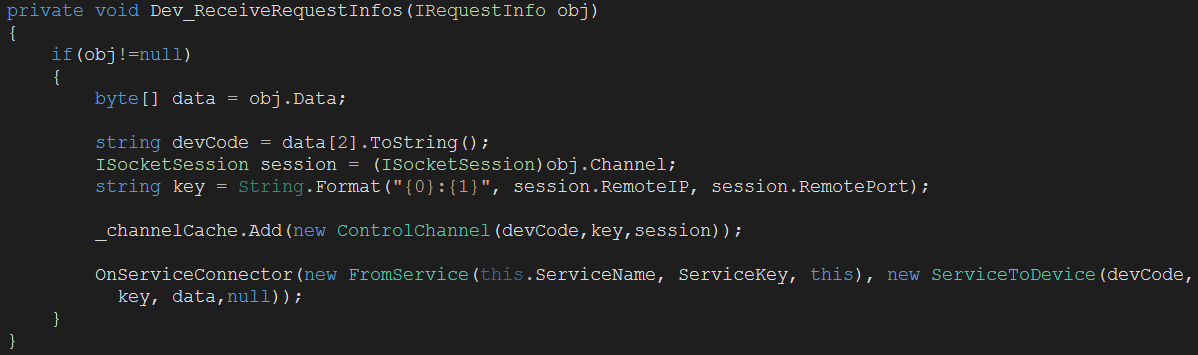
dev.ReceiveRequestInfosдәӢ件жҳҜжҺ§еҲ¶й©ұеҠЁз»§жүҝServerSuperIOжЎҶжһ¶дёӯRunDeviceй©ұеҠЁзұ»жү©еұ•зҡ„дәӢ件жҺҘеҸЈпјҢServerSuperIOеҚ•дҫӢжЁЎејҸжҺҘ收еҲ°ж•°жҚ®дҝЎжҒҜпјҢеҰӮжһңз¬ҰеҗҲеҚҸи®®ж ҮеҮҶдјҡжҠҠж•°жҚ®дҝЎжҒҜеҸҚйҰҲз»ҷй©ұеҠЁзЁӢеәҸзҡ„CommunicateжҺҘеҸЈпјҢReceiveRequestInfosдәӢ件жҠҠж•°жҚ®дҝЎжҒҜдј йҖ’з»ҷд»ЈзҗҶжңҚеҠЎи®ўйҳ…иҜҘдәӢ件зҡ„Dev_ReceiveRequestInfosеҮҪж•°гҖӮд»Јз ҒеҰӮдёӢеӣҫпјҡ
д»ЈзҗҶжңҚеҠЎдёӯзҡ„Dev_ReceiveRequestInfosеҮҪж•°пјҢйҖҡиҝҮжңҚеҠЎиҝһжҺҘеҷЁжҺҘеҸЈIServiceConnectorпјҢж №жҚ®DeviceCodeпјҲaddrпјүжҠҠдҝЎжҒҜдј йҖ’з»ҷзӣёеә”зҡ„и®ҫеӨҮй©ұеҠЁгҖӮд»Јз ҒеҰӮдёӢеӣҫпјҡ
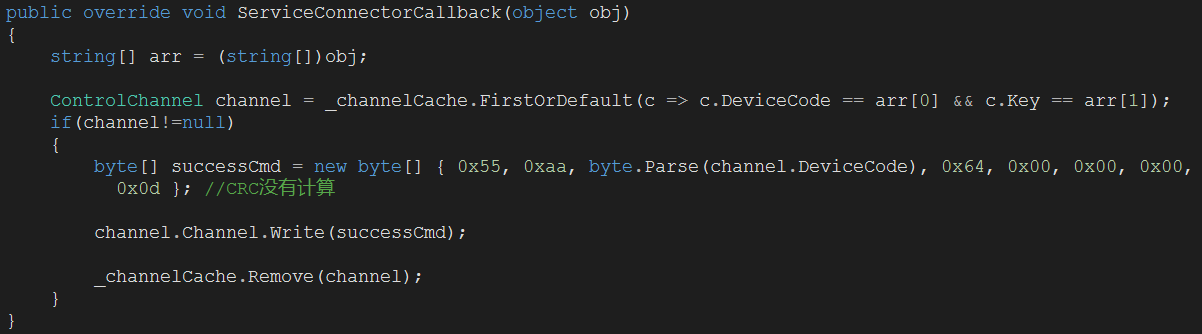
д»ЈзҗҶжңҚеҠЎйҖҡиҝҮServiceConnectorCallbackе’ҢServiceConnectorCallbackErrorеҮҪж•°жҺҘеҸЈжҺҘ收и®ҫеӨҮй©ұеҠЁеҸҚйҰҲзҡ„з»“жһңдҝЎжҒҜпјҢеҰӮжһңдёӯй—ҙеҮәзҺ°ејӮеёёдјҡи°ғз”ЁServiceConnectorCallbackErrorпјҢеҰӮжһңжӯЈеёёдјҡи°ғз”ЁServiceConnectorCallbackеҮҪж•°пјҢServiceConnectorCallbackеҮҪж•°жҺҘеҸЈж №жҚ®и®°еҪ•зҡ„е‘Ҫд»ӨдёҺIOйҖҡйҒ“зҡ„еҜ№еә”е…ізі»пјҢеҶҚжҠҠз»“жһңеҸ‘йҖҒз»ҷжҺ§еҲ¶з«ҜгҖӮServiceConnectorCallbackд»Јз ҒеҰӮдёӢеӣҫпјҡ
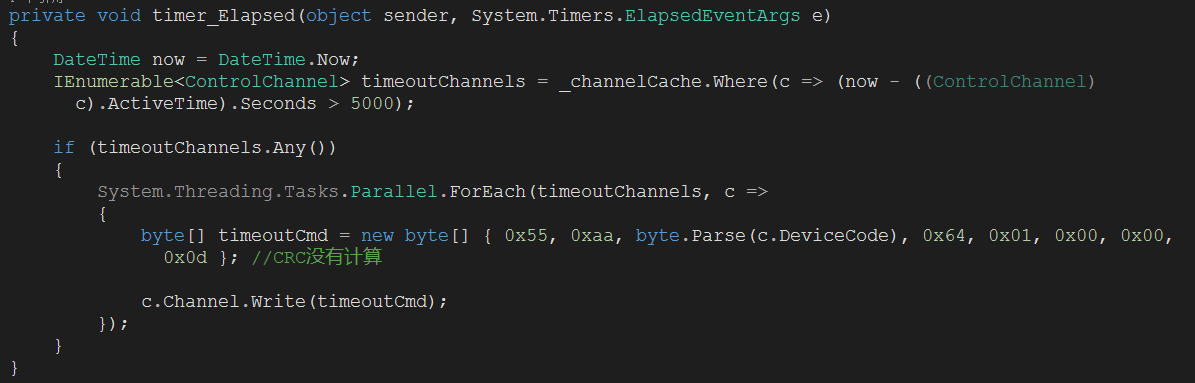
еңЁиҝҷйҮҢиҫ№жңүдёҖдёӘжіЁж„Ҹзҡ„ең°ж–№пјҢе°ұжҳҜи®ҫеӨҮй©ұеҠЁеңЁи§„е®ҡзҡ„ж—¶й—ҙеҶ…жІЎжңүеҸҚйҰҲжҺ§еҲ¶е‘Ҫд»Өзҡ„зЎ®и®ӨдҝЎжҒҜпјҢд№ҹе°ұжҳҜдј ж„ҹеҷЁжІЎжңүеҸҚйҰҲзӣёеә”зҡ„дҝЎжҒҜгҖӮиҝҷз§Қжғ…еҶөиҰҒеўһеҠ дёҖдёӘе®ҡж—¶жЈҖжөӢжңҚеҠЎпјҢеҰӮжһңи¶…ж—¶жІЎжңүеҸҚйҰҲдҝЎжҒҜпјҢеҸ‘йҖҒз»ҷжҺ§еҲ¶з«Ҝзӣёеә”зҡ„ж¶ҲжҒҜгҖӮд»Јз ҒеҰӮдёӢеӣҫпјҡ
21.6 и®ҫеӨҮй©ұеҠЁ
иҝҷдёӘи®ҫеӨҮй©ұеҠЁдёҺдј ж„ҹеҷЁзӣёеҜ№еә”пјҢд№Ӣй—ҙзӣёдә’иҝҮиЎҢж•°жҚ®дәӨдә’гҖӮи®ҫеӨҮй©ұеҠЁзҡ„RunServiceConnectorжҺҘеҸЈиҙҹиҙЈжҺҘ收代зҗҶжңҚеҠЎDev_ReceiveRequestInfosпјҲOnServiceConnectorпјүеҮҪж•°дј йҖ’иҝҮжқҘзҡ„е‘Ҫд»ӨдҝЎжҒҜгҖӮд»Јз ҒеҰӮдёӢеӣҫпјҡ
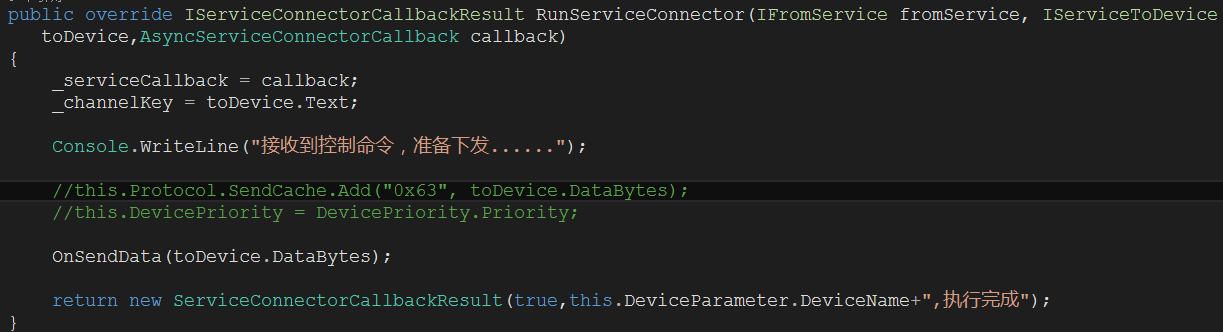
жңүдёӨзӮ№иҜҙжҳҺпјҡ1.жҺҘ收еҲ°е‘Ҫд»Өж•°жҚ®еҗҺеҸҜд»ҘйҖҡиҝҮOnSendDataеҮҪж•°з«ӢеҚідёӢеҸ‘ж•°жҚ®дҝЎжҒҜпјҢд»Ҙи®ҫзҪ®зҡ„IPжҹҘжүҫзӣёеә”зҡ„IOйҖҡйҒ“пјҢйҖӮз”ЁдәҺиҮӘжҺ§жЁЎејҸгҖӮ2. жҺҘ收еҲ°е‘Ҫд»Өж•°жҚ®еҗҺж”ҫеҲ°this.Protocol.SendCacheеҚҸи®®зј“еӯҳдёӯпјҢзӯүеҫ…дёӢеҸ‘е‘Ҫд»ӨпјҢйҖӮз”ЁдәҺиҪ®иҜўгҖҒ并еҸ‘жЁЎејҸгҖӮ
й’ҲеҜ№дәҺиҝ”еӣһзҡ„з»“жһңеҜ№иұЎServiceConnectorCallbackResultзҡ„isAsynеҸӮж•°пјҢеҰӮжһңдёәtrueпјҢиҜҙжҳҺйҖҡиҝҮAsyncServiceConnectorCallback callbackиҝ”еӣһз»“жһңдҝЎжҒҜпјҢд№ҹе°ұжҳҜиҜҙиҰҒзӯүеҫ…дј ж„ҹеҷЁиҝ”еӣһзЎ®и®ӨдҝЎжҒҜпјҢ并且и®ҫеӨҮй©ұеҠЁжҺҘ收еҗҺеҶҚеҸҚйҰҲеҲ°д»ЈзҗҶжңҚеҠЎпјӣеҰӮжһңдёәfalseпјҢиҜҙжҳҺдјҡз«ӢеҚіеҸҚйҰҲеҲ°д»ЈзҗҶжңҚеҠЎпјҢйҖӮз”ЁдәҺдј йҖ’ж•°жҚ®дҝЎжҒҜиҖҢдёҚз®ЎдёҺдј ж„ҹеҷЁжҳҜеҗҰдәӨдә’жҲҗеҠҹгҖӮ
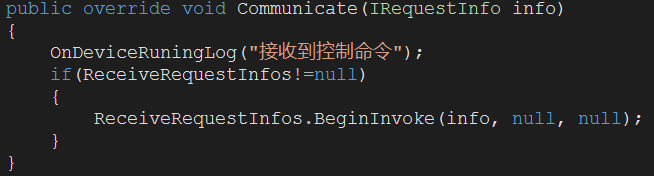
еҸҜд»ҘеңЁиҝҷдёӘеҮҪж•°дёӯжҠҠcallbackеҸӮж•°иҝӣиЎҢдёҙж—¶дҝқеӯҳпјҢзӯүеҫ…дј ж„ҹеҷЁиҝ”еӣһзЎ®и®ӨдҝЎжҒҜеҗҺеңЁCommunicateеҮҪж•°дёӯи§ҰеҸ‘ејӮжӯҘеӣһи°ғеҲ°д»ЈзҗҶжңҚеҠЎгҖӮд»Јз ҒеҰӮдёӢеӣҫпјҡ

21.7 DemoиҜҙжҳҺ
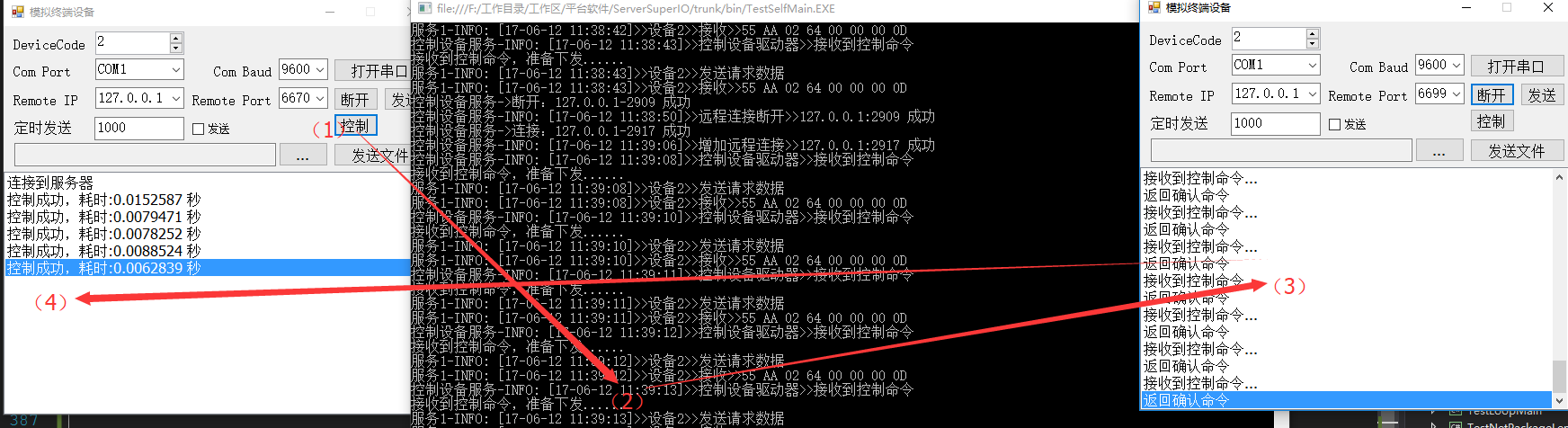
жү“ејҖдёӨдёӘTestDeviceзЁӢеәҸпјҢдёҖдёӘдҪңдёәи®ҫеӨҮдј ж„ҹеҷЁпјҢдёҖдёӘдҪңдёәжҺ§еҲ¶з«ҜпјҢDeviceCodeиҰҒд»Ҙеә”пјӣTestDeviceDriverжҳҜи®ҫеӨҮй©ұеҠЁпјҢеңЁжңҚеҠЎе®һдҫӢдёӯеҠ иҪҪпјҢжҲ‘з”Ёзҡ„жҳҜиҮӘжҺ§жЁЎејҸпјҢдҪҝз”ЁTestSelfMainйЎ№зӣ®пјӣControlDeviceServiceжҳҜд»ЈзҗҶжңҚеҠЎпјҢеңЁTestSelfMainдёӯеҠ иҪҪгҖӮ
еҲ°жӯӨпјҢе…ідәҺвҖңServerSuperIOеҰӮдҪ•еҪўжҲҗеӣһи·ҜжҺ§еҲ¶вҖқзҡ„еӯҰд№ е°ұз»“жқҹдәҶпјҢеёҢжңӣиғҪеӨҹи§ЈеҶіеӨ§е®¶зҡ„з–‘жғ‘гҖӮзҗҶи®әдёҺе®һи·өзҡ„жҗӯй…ҚиғҪжӣҙеҘҪзҡ„её®еҠ©еӨ§е®¶еӯҰд№ пјҢеҝ«еҺ»иҜ•иҜ•еҗ§пјҒиӢҘжғіз»§з»ӯеӯҰд№ жӣҙеӨҡзӣёе…ізҹҘиҜҶпјҢиҜ·з»§з»ӯе…іжіЁдәҝйҖҹдә‘зҪ‘з«ҷпјҢе°Ҹзј–дјҡ继з»ӯеҠӘеҠӣдёәеӨ§е®¶еёҰжқҘжӣҙеӨҡе®һз”Ёзҡ„ж–Үз« пјҒ





