小编给大家分享一下VxWorks中多任务通信的示例分析,希望大家阅读完这篇文章之后都有所收获,下面让我们一起去探讨吧!
VxWorks是一个典型的多任务操作系统。这多个任务之间不可能完全的彼此独立,它们需要一些系统机制来协调彼此的动作。这些机制就属于多任务通信,主要可以分为两类:事件通知、数据传递。
VxWorks系统提供了多种任务间通信机制:中断锁、任务锁、多种信号量、消息队列、管道、VxWorks事件(VxWorks Event)、消息通道。另外,同一内存空间里的任务(都在内核,或在同一RTP里)可以通过访问共享的数据结构,直接进行数据交换。不过,这些共享资源最好由互斥机制进行保护
中断锁 - 可以关闭中断,阻止ISR抢占。这可不是通用机制,一定要谨慎使用
任务锁 - 可以关闭其它任务的抢占。同样也不是通用机制,要谨慎使用
信号量 - 任务同步与互斥的基本方法。VxWorks提供四种信号量,以及POSIX信号量。还可以将信号量创建为公共对象,用于进程间通信
消息队列 - 直接在任务间传递消息(数据)的高级机制。也可以创建为公共对象,用于进程间通信
管道 - 在消息队列上封装的另一种消息机制。通过标准I/O函数和select()来操作
VxWorks事件 - 可用于任务-任务、ISR-任务、信号量-任务、消息队列-任务之间的同步与通信
消息通道 - 基于socket的通信机制,可用于任务间、进程间、处理器间通信
另外还有信号(Signal)可以在任务和进程间传递事件,不过一般不把它当作通信机制
共享数据结构
同一内存空间里(都在内核,或在同一RTP里)的任务之间,最显而易见的的通信方式就是访问共享的数据结构,因为它们使用单一线性地址空间
不同的任务可以直接访问全局变量、线性缓冲区、环形缓冲区、链表,以及指针。不过这些共享的数据结构,需要使用互斥机制(例如互斥信号量)来保护
中断锁
函数intLock()关闭中断,阻止ISR的抢占。在任务或ISR里都可以调用它。函数intUnLock()重新使能中断。这一对儿函数通常用于保护临界区域
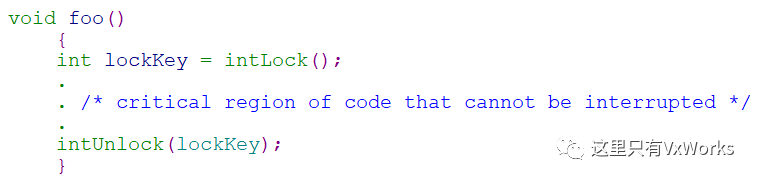
当任务去访问ISR也会访问的数据结构时,就使用intLock()来阻止ISR的抢占。很显然,这种操作应该尽可能的简短,甚至不要调用任何函数。否则它直接影响到中断延时,导致系统的不确定性。如果还要阻止任务的抢占,那么同时要使用taskLock()
警告:使用中断锁时,再调用系统函数的话,可以导致中断不定期的重新使能,例如调用的函数发生阻塞,或者激活高优先级任务
任务锁
函数taskLock()关闭任务抢占,仅让当前任务执行,除非当前任务阻塞或挂起。当这个任务解除阻塞、恢复执行后,它会再次禁止任务抢占。函数taskUnlock()恢复其它任务的抢占。这一对儿函数也用于保护临界区域,不过不能在ISR中使用
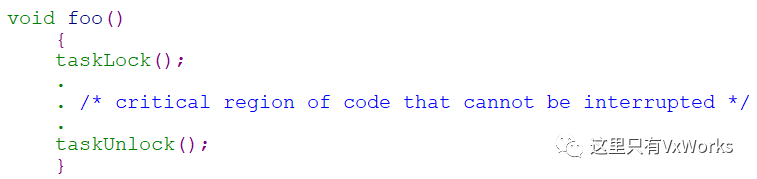
任务锁可以嵌套使用,其内部有计数器,因此同等数量的taskUnlock()被调用后,才能真正的重新使能任务抢占
注意: 任务锁可能影响系统的实时响应时间,因为它阻止了高优先级任务的执行,通常互斥信号量是个更好的选择。另外,任务锁不会阻止中断。想要同时阻止中断抢占的话,就同时使用intLock()
看完了这篇文章,相信你对“VxWorks中多任务通信的示例分析”有了一定的了解,如果想了解更多相关知识,欢迎关注亿速云行业资讯频道,感谢各位的阅读!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





