这篇文章给大家分享的是有关怎么用树莓派来制作简单的遥控小车的内容。小编觉得挺实用的,因此分享给大家做个参考,一起跟随小编过来看看吧。
树莓派,(本文使用的是Raspberry PI 2 B型,即2B)
8G以上TF卡 树莓派上可用和不可用的SD卡列表
四驱小车底(含电机,注:本文中的小车底盘佩戴的是高扭矩直流电机)
母对母、公对母、公对公(可不用)杜邦线
L298N双HD桥电机驱动板
无线网卡(最好支持AP的)
充电电池组(7V以上的,镍氢或者18650充电电池皆可)
系统安装没什么说的,系统烧到SD就可以了,我使用的Raspbian,这货是基于Debian的,配置命令习惯几乎和ubuntu/debian一样,接上网线开机进入系统配置。
换上中科大的源,再apt-get update一次;
为root用户设置密码;
配置无线网卡有两中方案,编辑/etc/network/interface,网上教程蛮多的:
自动连接到路由器,家里有无线路由器,小车在WIFI覆盖的地方;
树莓派上搭建WIFI热点,信号更好,可以在小区里面开,顺便勾搭妹子,哦哦哦,不对,应该是淘气小孩。唯一需要注意的是网卡芯片。
拼装没啥难度,亚克力板上的牛皮纸沾得简直是丧心病狂,马蛋,废了好一会儿功夫才撕干净(⊙﹏⊙)b;
马达那货就比较坑了,没有带线是裸机的,手中也恰巧没有电烙铁,当时我就懵逼啦。好吧,手中还有多余的公对公杜邦线,拔掉其中一头的接头,打火机烧一下(小时候学会的神技),拔掉一部分把铜线拧紧。最后铜线穿过马达接口的小洞里面,再拧紧。哎丫,没有胶带,最后用透明胶凑合凑合,绑紧。repeat 4次。
之前一直没玩过硬件,毕竟我只是一个网工出身的程序猿,第一次拿到L298N研究了好久才明白,还是上图上图。 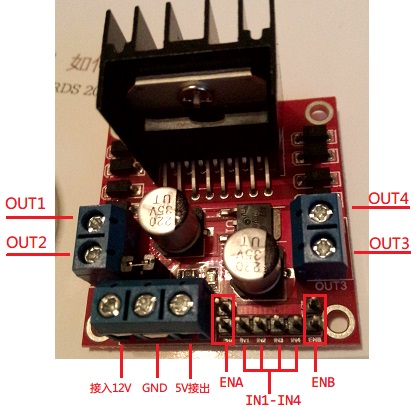
+12V接口 +5V~+35V, 如需要板内取电,则供电范围Vs:+7V~+35V
电机 OUT1、OUT2 为电机A输出;OUT3、OUT4为电机B输出
IO接口 ENA和ENA分别为A、B电机的使能端,一开始ENA和ENB各自的上下两个针脚是用跳线帽连接起来的,拔掉就可以接线了。 IN1-IN4 为IO控制输入。
弄明白L298N之后,连接就方便多了,
OUT1 OUT2 连接小车左侧前后两个电机(并联),之前电机接出来的杜邦线公头直接往接口里面塞(好羞羞),拧紧螺丝;同理,OUT3 OUT4 连接小车右侧前后两个电机;
便宜的镍氢电池组电源正负极分别连接12V、GND,电池组的接头是JST母头,比较好连接;
5V和GND连接到树莓派上的5V和GND用于供电。
ENA、ENB、IN1-IN4连接到树莓派I/O端口上。
接好之后是这样子:

摄像头是好几年前台式机用的摄像头,分辨率是奇葩的470x640,而不是480x640,mjpg-streamer下,画面是花的,等到画面调正常之后,画面却如放幻灯片一样。我勒个去!摄像头连接到装了openwrt的wndr3800路由器上流畅的没朋友,在树莓派上调来调去却怎么也不行,认命了,放弃放弃,没有摄像头也能当遥控车开。
终于到了编程部分,为了简单,使用python的RPI.GPIO模块来操作I/O,不过我发现功能蛮少的,没找到调速的API,文档在这里,代码如下,轮子的参数视接的I/O口而定。
<!-- lang: python --> import RPi.GPIO as gpio class Wheel(object): def __init__(self, in_pin1, in_pin2, enable_pin1, enable_pin2): ''' :param in_pin1 in_pin2: IN1 IN2 or IN3 IN4 :param enable_pin1 enable_pin2: ENA or ENB ''' self.pin1 = in_pin1 self.pin2 = in_pin2 # setup I/O OUT gpio.setup(in_pin1, gpio.OUT) gpio.setup(in_pin2, gpio.OUT) gpio.setup(enable_pin1, gpio.OUT) gpio.setup(enable_pin2, gpio.OUT) # enable gpio.output(enable_pin1, True) gpio.output(enable_pin2, True) def forward(self): gpio.output(self.pin1, True) gpio.output(self.pin2, False) def backward(self): gpio.output(self.pin1, False) gpio.output(self.pin2, True) def stop(self): gpio.output(self.pin1, False) gpio.output(self.pin2, False) class Car(object): def __init__(self): gpio.setmode(gpio.BOARD) self.left_wheel = Wheel(13, 15, 7, 11) self.right_wheel = Wheel(16, 18, 22, 29) def forward(self): self.left_wheel.forward() self.right_wheel.forward() def backward(self): self.left_wheel.backward() self.right_wheel.backward() def left(self): self.left_wheel.stop() self.right_wheel.forward() def right(self): self.left_wheel.forward() self.right_wheel.stop() def stop(self): self.left_wheel.stop() self.right_wheel.stop() def shutdown(self): self.stop() gpio.cleanup()
感谢各位的阅读!关于“怎么用树莓派来制作简单的遥控小车”这篇文章就分享到这里了,希望以上内容可以对大家有一定的帮助,让大家可以学到更多知识,如果觉得文章不错,可以把它分享出去让更多的人看到吧!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





