今天给大家介绍一下Harris特征点是什么。文章的内容小编觉得不错,现在给大家分享一下,觉得有需要的朋友可以了解一下,希望对大家有所帮助,下面跟着小编的思路一起来阅读吧。
1)Moravec算子各向异性响应
Moravec算子仅仅在8个方向(水平、垂直和四个对角方向)计算灰度变化,为了对其扩展,有必要设计一个可以在任何方向对灰度变化进行测度的函数。1988年,Harris和Stephen通过对Moravec算子进行展开,推导得到了Prewitt算子,也即Harris算子。
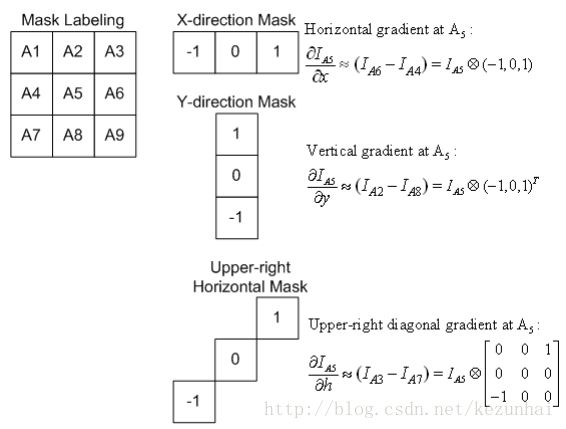
我们先来看看与Harris相关的背景知识。通常,Prewitt算子被用来对图像的梯度进行近似。然而,在实际应用中,一阶梯度通过下图中的公式来进行近似:
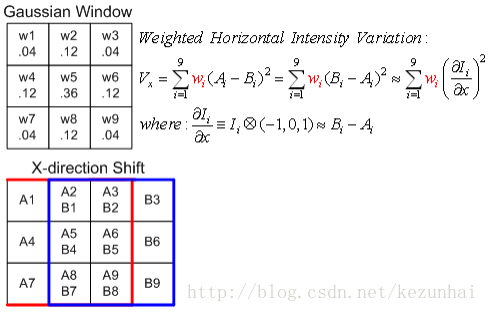
对Morevec算子进行分析可以得到:两个Morevec窗口中对应像素差的和可以作为图像梯度的合理近似。我们再来看下图:

通过对上图的分析,我们有可以进一步得到:morevec算子中的灰度变化可以采用图像梯度进行近似。
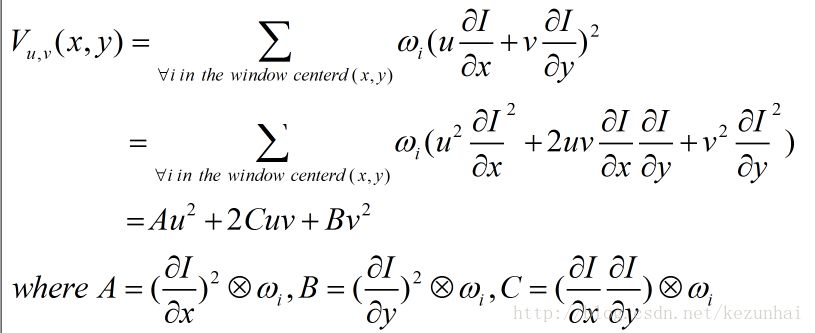
通过上面的分析,灰度的变化可以表示为图像梯度的函数,公式表示如下:

其中,(u,v)表示滑动,x方向为(1,0),y方向为(0,1),微分的计算如上图所示。
到这里,大家非常明了:上式可以对moravec算子中的灰度变化计算进行精确的逼近。但是又与Moravec算子中灰度变化不同的是通过合理的选择(u,v)可以对任何方向的灰度变化进行测度。
2)噪声响应
在Moravec算子中,滑动窗采用的是方形的,方形窗使得不同方向上的中心像素与边界像素的欧式距离是变化的。为了克服这个问题,Harris&Stephen提出只需将方向窗改成圆窗。同时,窗中的每个像素是同等地位的,理论上应该是离中心越近的权重越大,而离中心越远,权重越小,因此我们加入高斯权重。因此,灰度变化的新测度方式可以通过下图来表示:
通过公式表示如下:

其中,wi表示位置i处的高斯权重。
边缘的强响应
因为Moravec算子在边缘处很容易出现误检,Harris&Stephen通过考虑不同方向的灰度度量形成新的角度性测度(cornerness measure)。接着,我们对上面的式子进行变换,如下式:
Harris&Stephen同时也注意到,上式可以写成:
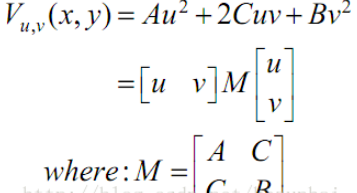
对上面的矩阵M,其特征值与图像表面的主曲率是成正比的,并且形成了对M的旋转不变的描述(Proportional to the principle curvature of the image surface and form a rotationally invariant description of M)。然后,由于M是通过水平和垂直方向的梯度来近似的,他们不是真正的旋转不变。
同样,与Moravec算子一样,我们再来看下面的四张张图:
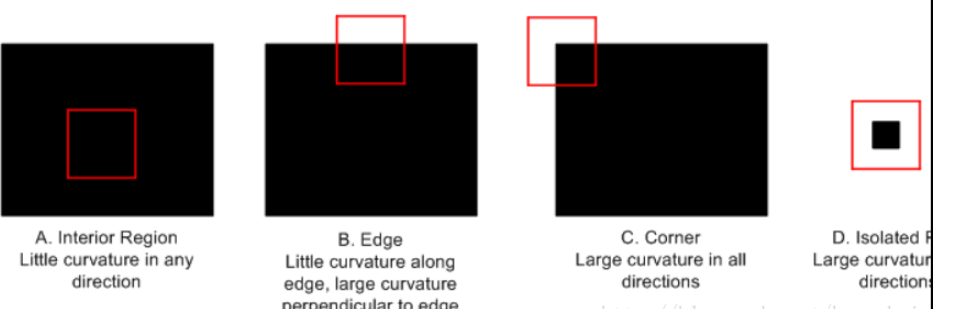
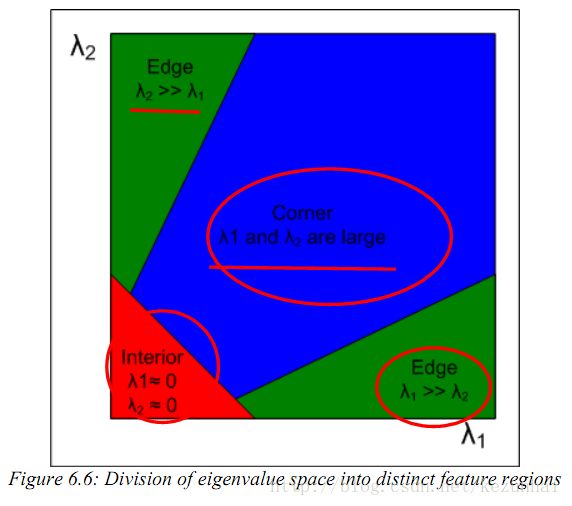
图中A表示在一个物体的内部或背景上,窗口内的灰度值相对不变,因此该窗口表面上几乎没有曲率,因此M的特征值相对很小;B窗口在一个边缘处,垂直于边缘的地方将有明显很大的曲率,而平行于边缘的地方几乎没什么曲率,因此该形式下M的特征值一个会比较大,另一个较小;C和D对应于角度和离散点,在两个方向都会有很大的曲率,因此,M的特征值都将会很大。假设r1和r2是M的两个特征值,通过上面的分析,可以将一个平面表示为以下三个可区分的区域:
Harris&Stephen提出下面的角点性测度: k一般取值04~0.6。
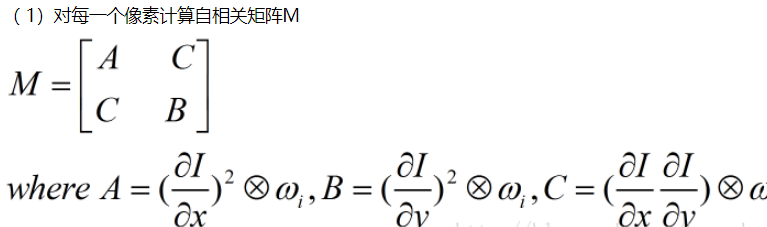
最后,我们来总结下Harris算子的计算步骤:
( 1)对每一个像素计算自相关矩阵M
(2)构造角点性映射图(Construct cornerness map)
(3)阈值化,对得到的C(x,y)进行阈值
(4)非极大值抑制
以上就是Harris特征点是什么的全部内容了,更多与Harris特征点是什么相关的内容可以搜索亿速云之前的文章或者浏览下面的文章进行学习哈!相信小编会给大家增添更多知识,希望大家能够支持一下亿速云!
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。
原文链接:https://my.oschina.net/u/4581492/blog/4580965



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



