OpenCV图像处理中如何利用多尺度融合提升图像细节,针对这个问题,这篇文章详细介绍了相对应的分析和解答,希望可以帮助更多想解决这个问题的小伙伴找到更简单易行的方法。
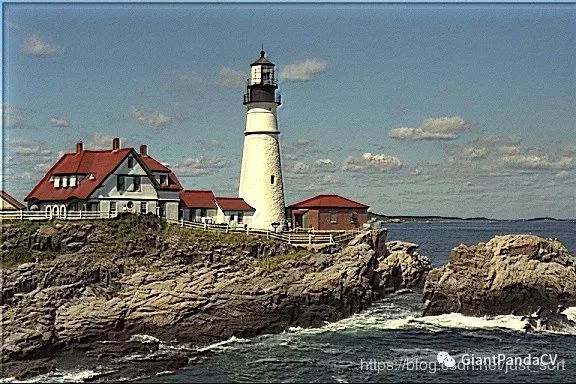
今天为大家介绍一个利用多尺度来提升图像细节的算法。如果你想自己的图片细节看起来更加丰富的话可以尝试一下这个算法。
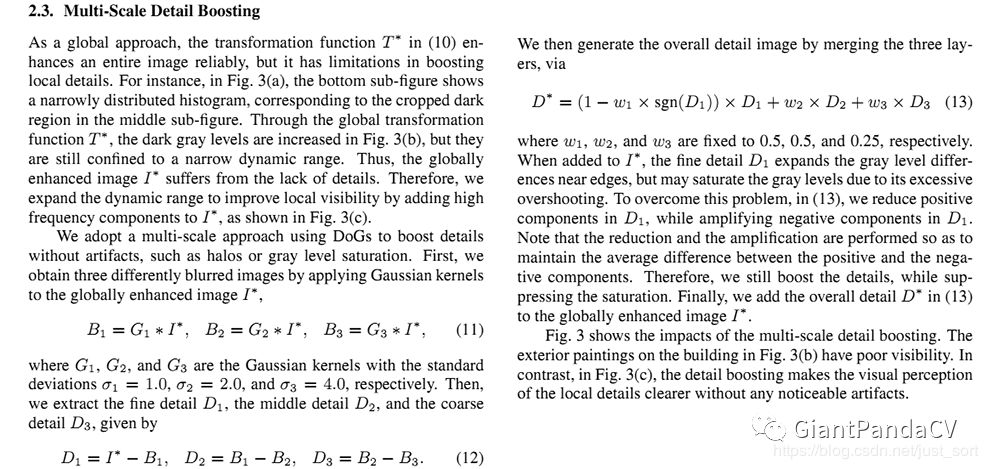
核心就是,论文使用了Retinex方法类似的思路,使用了多个尺度的高斯核对原图滤波,然后再和原图做减法,获得不同程度的细节信息,然后通过一定的组合方式把这些细节信息融合到原图中,从而得到加强原图信息的能力。公式十分简单,注意到第一个系数有点特殊,实现的话,直接看下图的几个公式即可。
「从深度学习中特征金字塔网络的思想来看,这个算法实际上就是将不同尺度上的特征图进行了融合,不过这个方式是直接针对原图进行,比较粗暴,但有个好处就是这个算法用于预处理阶段是易于优化的,关于如何优化后面讲SSE指令集优化的时候再来讨论,今天先提供原始的实现啦。」
void separateGaussianFilter(const Mat &src, Mat &dst, int ksize, double sigma){ CV_Assert(src.channels()==1 || src.channels() == 3); //只处理单通道或者三通道图像 //生成一维的 double *matrix = new double[ksize]; double sum = 0; int origin = ksize / 2; for(int i = 0; i < ksize; i++){ double g = exp(-(i-origin) * (i-origin) / (2 * sigma * sigma)); sum += g; matrix[i] = g; } for(int i = 0; i < ksize; i++) matrix[i] /= sum; int border = ksize / 2; copyMakeBorder(src, dst, border, border, border, border, BORDER_CONSTANT); int channels = dst.channels(); int rows = dst.rows - border; int cols = dst.cols - border; //水平方向 for(int i = border; i < rows; i++){ for(int j = border; j < cols; j++){ double sum[3] = {0}; for(int k = -border; k<=border; k++){ if(channels == 1){ sum[0] += matrix[border + k] * dst.at<uchar>(i, j+k); }else if(channels == 3){ Vec3b rgb = dst.at<Vec3b>(i, j+k); sum[0] += matrix[border+k] * rgb[0]; sum[1] += matrix[border+k] * rgb[1]; sum[2] += matrix[border+k] * rgb[2]; } } for(int k = 0; k < channels; k++){ if(sum[k] < 0) sum[k] = 0; else if(sum[k] > 255) sum[k] = 255; } if(channels == 1) dst.at<Vec3b>(i, j) = static_cast<uchar>(sum[0]); else if(channels == 3){ Vec3b rgb = {static_cast<uchar>(sum[0]), static_cast<uchar>(sum[1]), static_cast<uchar>(sum[2])}; dst.at<Vec3b>(i, j) = rgb; } } } //竖直方向 for(int i = border; i < rows; i++){ for(int j = border; j < cols; j++){ double sum[3] = {0}; for(int k = -border; k<=border; k++){ if(channels == 1){ sum[0] += matrix[border + k] * dst.at<uchar>(i+k, j); }else if(channels == 3){ Vec3b rgb = dst.at<Vec3b>(i+k, j); sum[0] += matrix[border+k] * rgb[0]; sum[1] += matrix[border+k] * rgb[1]; sum[2] += matrix[border+k] * rgb[2]; } } for(int k = 0; k < channels; k++){ if(sum[k] < 0) sum[k] = 0; else if(sum[k] > 255) sum[k] = 255; } if(channels == 1) dst.at<Vec3b>(i, j) = static_cast<uchar>(sum[0]); else if(channels == 3){ Vec3b rgb = {static_cast<uchar>(sum[0]), static_cast<uchar>(sum[1]), static_cast<uchar>(sum[2])}; dst.at<Vec3b>(i, j) = rgb; } } } delete [] matrix;}Mat MultiScaleDetailBoosting(Mat src, int Radius){ int rows = src.rows; int cols = src.cols; Mat B1, B2, B3; separateGaussianFilter(src, B1, Radius, 1.0); separateGaussianFilter(src, B2, Radius*2-1, 2.0); separateGaussianFilter(src, B3, Radius*4-1, 4.0); float w1 = 0.5, w2 = 0.5, w3 = 0.25; Mat dst(rows, cols, CV_8UC3); for(int i = 0; i < rows; i++){ for(int j = 0; j < cols; j++){ for(int k = 0; k < 3; k++){ int D1 = src.at<Vec3b>(i, j)[k] - B1.at<Vec3b>(i, j)[k]; int D2 = B1.at<Vec3b>(i, j)[k] - B2.at<Vec3b>(i, j)[k]; int D3 = B2.at<Vec3b>(i, j)[k] - B3.at<Vec3b>(i, j)[k]; int sign = D1 > 0 ? 1 : -1; dst.at<Vec3b>(i, j)[k] = saturate_cast<uchar>((1 - w1*sign) * D1 - w2 * D2 + w3 * D3 + src.at<Vec3b>(i, j)[k]); } } } return dst;}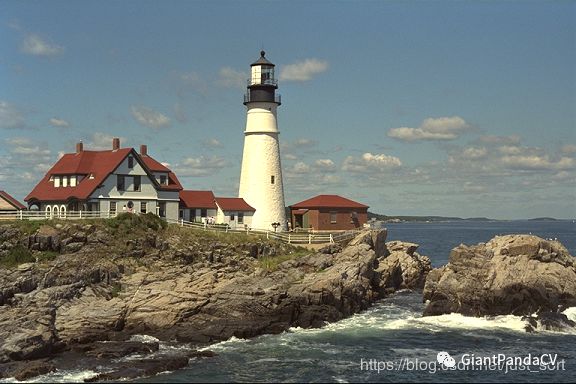
关于OpenCV图像处理中如何利用多尺度融合提升图像细节问题的解答就分享到这里了,希望以上内容可以对大家有一定的帮助,如果你还有很多疑惑没有解开,可以关注亿速云行业资讯频道了解更多相关知识。
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。
原文链接:https://my.oschina.net/u/4580321/blog/4358463



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



