openCVеҺ»йҷӨж–Үеӯ—дёӯд№ұе…Ҙзҡ„зәҝжқЎзҡ„ж–№жі•зӨәдҫӢ
иҝҷзҜҮж–Үз« дё»иҰҒи®Іи§ЈдәҶopenCVеҺ»йҷӨж–Үеӯ—дёӯд№ұе…Ҙзҡ„зәҝжқЎзҡ„ж–№жі•зӨәдҫӢпјҢеҶ…е®№жё…жҷ°жҳҺдәҶпјҢеҜ№жӯӨжңүе…ҙи¶Јзҡ„е°ҸдјҷдјҙеҸҜд»ҘеӯҰд№ дёҖдёӢпјҢзӣёдҝЎеӨ§е®¶йҳ…иҜ»е®Ңд№ӢеҗҺдјҡжңүеё®еҠ©гҖӮ
д»ҠеӨ©дёҠеҚҲпјҢжңӢеҸӢеҸ‘жқҘдёҖеј еӣҫзүҮеҰӮдёӢгҖӮжІЎй”ҷпјҢиҝҷе°ұжҳҜеҺҹеӣҫпјҢд»–еёҢжңӣеҸҜд»ҘйҖҡиҝҮдёҖдәӣз®ҖеҚ•зҡ„з®—жі•е°ҶеӣҫдёӯиҝҷжқЎз©ҝиҝҮеҚ•иҜҚй—ҙзҡ„зӣҙзәҝеҺ»жҺүпјҢдҪҝеҫ—еҲ°зҡ„з»“жһңиғҪеӨҹйҖҡиҝҮд»–зҡ„ж–Үеӯ—иҜҶеҲ«з®—法并еҫ—еҮәжӯЈзЎ®з»“жһңвҖ”вҖ”The Techniques of Machine VisionгҖӮ

д№ҚдёҖзңӢиҝҷдјјд№ҺжҢәз®ҖеҚ•пјҢ(1)е°ҶеӣҫеғҸдәҢеҖјеҢ–пјӣ(2)жүҫеҮәиҝҷжқЎзӣҙзәҝпјӣ(3)е°ҶзӣҙзәҝеҢәеҹҹеЎ«жҲҗиғҢжҷҜиүІпјҲеҚізҷҪиүІпјүпјӣ(4)еҶҚйҖҡиҝҮиҶЁиғҖгҖҒи…җиҡҖзӯүж“ҚдҪңе°ҶеҚ•иҜҚзјәеӨұзҡ„йғЁеҲҶз»ҷиЎҘе…ЁгҖӮд»ҘдёҠ4жӯҘдјјд№ҺеҸҜд»Ҙж»Ўи¶іиҰҒжұӮпјҢдҪҶжөӢиҜ•еҸ‘зҺ°пјҢж•ҲжһңдёҚе°Ҫдәәж„ҸгҖӮ
дёҖгҖҒжҢүдёҠиҝ°ж–№жі•е®һзҺ°иҝҮзЁӢ

дәҢеҖјеҢ–з»“жһңеҰӮеӣҫ1.1жүҖзӨәпјҢеҸҜд»ҘзңӢеҲ°еӣҫеғҸ并дёҚж ҮеҮҶпјҢзӣҙзәҝзІ—з»Ҷд№ҹдёҚдёҖпјҢжҲ‘们е°қиҜ•з”ЁйңҚеӨ«еҸҳжҚўжүҫдёҖдёӢзӣҙзәҝпјҢд»Јз ҒеҰӮдёӢ
void findLines(IplImage* raw, IplImage* dst)
{
IplImage* src = cvCloneImage(raw);
IplImage* canny = cvCreateImage(cvGetSize(src), IPL_DEPTH_8U, 1);
cvCanny(src, canny, 20, 200, 3);
CvMemStorage* stor = cvCreateMemStorage(0);
CvSeq* lines = NULL;
lines = cvHoughLines2(canny, stor, CV_HOUGH_PROBABILISTIC, 1, CV_PI / 180, 80, 200, 30);
cvZero(dst);
CvPoint maxStart, maxEnd;
int maxDistance = 0;
for (int i = 0; i < lines->total; i++)
{
CvPoint* line = (CvPoint*)cvGetSeqElem(lines, i);
if (abs(line[0].x - line[1].x) > maxDistance)
{
maxDistance = abs(line[0].x - line[1].x);
maxStart = line[0];
maxEnd = line[1];
}
}
cvLine(dst, maxStart, maxEnd, cvScalar(255), 1);
cvReleaseImage(&src);
cvReleaseMemStorage(&stor);
}з®ҖиҰҒи§ЈйҮҠдёҖдёӢиҝҷж®өд»Јз ҒгҖӮеҮҪж•°зҡ„еҠҹиғҪжҳҜеңЁиҫ“е…ҘеӣҫеғҸдёӯжүҫеҮәдёҖжқЎзӣҙзәҝпјҢиҫ“е…Ҙзҡ„еӣҫеғҸжҳҜзҒ°еәҰеӣҫrawпјҢиҝ”еӣһеҖјдёәdstпјҢиҝ”еӣһеҖјжҳҜд»ҘеӣҫзүҮзҡ„еҪўејҸпјҢе°ҶжүҫеҲ°зҡ„зӣҙзәҝз”»дёҠеӣҫдёӯгҖӮ
еҮҪж•°lines = cvHoughLines2(canny, stor, CV_HOUGH_PROBABILISTIC, 1, CV_PI / 180, 80, 200, 30);зҡ„еҸӮж•°иЎЁжҳҺпјҢиҰҒжұӮзӣҙзәҝй•ҝеәҰеңЁ200дёӘеғҸзҙ д»ҘдёҠпјҢдё”дёӨжқЎеңЁеҗҢдёҖзӣҙзәҝдёҠзҡ„зәҝж®өпјҢеҰӮжһңзӣёйҡ”дёҚеҲ°30дёӘеғҸзҙ пјҢе°ұжҠҠе®ғ们иҝһиө·жқҘгҖҗжіЁпјҡеӣҫзүҮе°әеҜёдёә1066Г—148гҖ‘гҖӮеҜ№дәҺжүҫеҲ°зҡ„еӨҡжқЎзӣҙзәҝпјҢи®ӨдёәжңҖй•ҝзҡ„дёҖжқЎжҳҜжҲ‘们иҰҒжүҫзҡ„йӮЈжқЎгҖӮжүҫи·қзҰ»ж—¶з”ЁдәҶabs(line[0].x - line[1].x);жҳҜдёҚдёҘж јзҡ„пјҢдёҘж јжқҘи®Іеә”иҜҘжҳҜ
sqrt((line[0].x - line[1].x)*(line[0].x - line[1].x)+(line[0].y - line[1].y)*(line[0].x - line[1].x))
дёҚиҝҮеӣҫдёӯзҡ„зӣҙзәҝжҺҘиҝ‘ж°ҙе№іпјҢиҝҷйҮҢе°ұз®ҖеҢ–дёҖдёӢе•ҰгҖӮ
жүҖд»Ҙе°ҶиҝҗиЎҢиҝҷж®өд»Јз ҒеҗҺпјҢиҝ”еӣһзҡ„еӣҫзүҮdstеә”иҜҘжҳҜиҝҷж ·еӯҗзҡ„
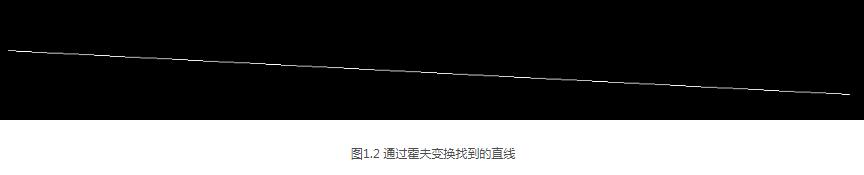
еӣҫ1.2дёӯзӣҙзәҝзҡ„зІ—зәҝеҸҜд»ҘйҖҡиҝҮж”№еҸҳcvLine(dst, maxStart, maxEnd, cvScalar(255), 1);жңҖеҗҺдёҖдёӘеҸӮж•°жқҘи°ғж•ҙпјҢиҝҷйҮҢз”Ёзҡ„жҳҜ1гҖӮ
жҺҘдёӢжқҘжӯҘйӘӨе°ұжҳҜеңЁдәҢеҖјеҢ–еӣҫ(еӣҫ1.1)дёӯеҺ»жҺүиҝҷжқЎзәҝпјҢд»Јз ҒеҰӮдёӢпјҡ
void eraseLine(IplImage* src, IplImage* flag)
{// flagдёәеӣҫ1.2жүҖзӨәзҡ„еӣҫзүҮпјҢsrcдёәеӣҫ1.1жүҖзӨәзҡ„дәҢеҖјеҢ–еӣҫзүҮ
for (int row = 0; row < src->height; row++)
for (int col = 0; col < src->width; col++)
{ // еҰӮжһңеңЁзҷҪиүІзәҝж®өдёҠпјҢеҲҷе°ҶдәҢеҖјеҢ–еӣҫзүҮеЎ«дёәзҷҪиүІ
if (cvGet2D(flag, row, col).val[0] == 255)
cvSet2D(src, row, col, cvScalar(255));
}
}еҪ“зӣҙзәҝзҡ„е®ҪеәҰеҲҶеҲ«дёә2гҖҒ3дёӘеғҸзҙ ж—¶пјҢдәҢеҖјеҢ–еӣҫеҺ»жҺүзӣҙзәҝеҗҺзҡ„ж•ҲжһңеҰӮдёӢ
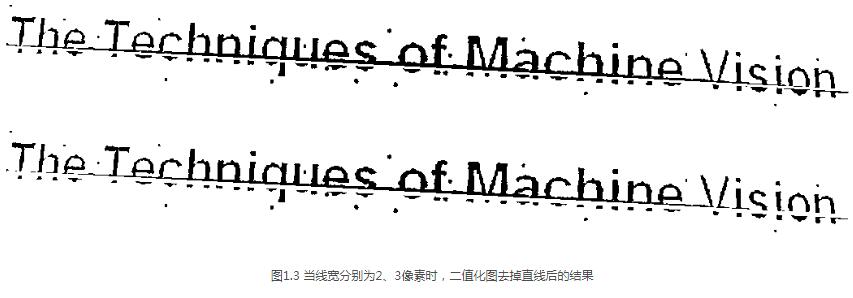
еҸҜд»ҘзңӢеҲ°пјҢж•ҲжһңеҫҲе·®пјҢеҰӮжһңиҰҒиҶЁиғҖпјҲй»‘иүІйғЁеҲҶеҮҸе°ҸпјүпјҢеҚ•иҜҚдёӢиҫ№йғЁеҲҶйғҪдјҡж¶ҲеӨұдәҶпјҢзӣҙжҺҘи…җиҡҖпјҲй»‘иүІйғЁеҲҶеўһеӨ§пјүпјҢзәҝеҸҲдёҚиғҪе®Ңе…ЁеҺ»жҺүгҖӮ
еҗҺжқҘпјҢжҲ‘йҮҮз”Ёзҡ„еҠһжі•жҳҜпјҢеҜ№еӣҫ1.3йҮҚж–°жүҫдёҖж¬ЎзӣҙзәҝпјҲеҮҸеҺ»дёҖж¬ЎзӣҙзәҝеҗҺпјҢдёӯй—ҙиҝҳж®Ӣз•ҷдёҖйғЁеҲҶзҹӯдәӣзҡ„зӣҙзәҝпјүпјҢеҶҚеҮҸжҺүпјҢеҶҚжүҫеҶҚеҮҸжҺүгҖӮеҗҺйқўеҶҚеҜ№еӣҫеғҸиҝӣиЎҢи…җиҡҖпјҲй»‘иүІйғЁеҲҶеўһй•ҝпјүгҖӮжңҖз»Ҳж•ҲжһңжңҖеҘҪиҝҷе°ұеҰӮдёӢеӣҫжүҖзӨә
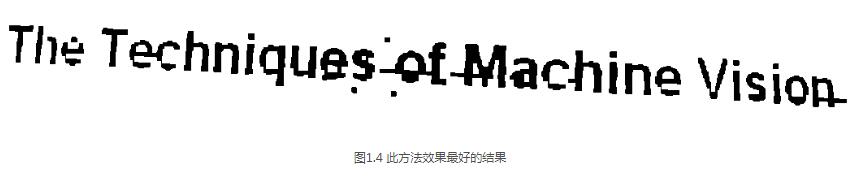
дҪҶиҝҷз§Қж–№жі•з”Ёж—¶й•ҝгҖҒй’ҲеҜ№дёҚеҗҢзҡ„зӣҙзәҝпјҢжүҫзӣҙзәҝ-еҮҸзӣҙзәҝ зҡ„йҮҚеӨҚж¬Ўж•°иҝҳдёҚдёҖж ·пјҢдёҚе…·жңүеҸҜ移жӨҚжҖ§гҖӮиҖҢдё”е•ҠпјҢиҝҷдёӘеӣҫзүҮиҜҶеҲ«еҮәжқҘзҡ„з»“жһңжҳҜ
The Technique_sJ_otMachine Vision
жүҖд»ҘйңҖиҰҒйҮҮз”Ёж–°зҡ„еҠһжі•жқҘи§ЈеҶіиҝҷдёӘй—®йўҳгҖӮ
дәҢгҖҒж–°зҡ„еҠһжі•
жәҗд»Јз ҒеҰӮдёӢ
#include <cv.h>
#include <highgui.h>
#include <iostream>
using namespace std;
/*
еҮҪж•°еҠҹиғҪпјҡеңЁиҫ“е…ҘеӣҫеғҸдёӯжүҫдёҖжқЎзӣҙзәҝ
иҫ“е…Ҙиҫ“еҮәпјҡиҫ“е…Ҙзҡ„еӣҫеғҸжҳҜзҒ°еәҰеӣҫrawпјҢиҝ”еӣһеҖјдёәdstпјҢиҝ”еӣһеҖјжҳҜдёҖжқЎзҷҪиүІзҡ„зәҝ
lines = cvHoughLines2(canny, stor, CV_HOUGH_PROBABILISTIC, 1, CV_PI / 180, 80, 200, 30);
еҸӮж•°дёӯзҡ„200жҳҜжҢҮиҰҒжүҫзҡ„зӣҙзәҝй•ҝеәҰиҰҒеңЁ200дёӘеғҸзҙ д»ҘдёҠпјӣ
еҸӮж•°дёӯзҡ„30жҢҮзҡ„жҳҜдёӨжқЎеңЁеҗҢдёҖзӣҙзәҝдёҠзҡ„зәҝж®өпјҢеҰӮжһңзӣёйҡ”дёҚеҲ°30пјҢеҲҷжҠҠе®ғ们иҝһиө·жқҘ
*/
void findLines(IplImage* raw, IplImage* dst)
{
IplImage* src = cvCloneImage(raw); // clone the input image
IplImage* canny = cvCreateImage(cvGetSize(src), IPL_DEPTH_8U, 1); // create a tmp image head to save gradient image
cvCanny(src, canny, 20, 200, 3); // Generate its gradient image
CvMemStorage* stor = cvCreateMemStorage(0);
CvSeq* lines = NULL;
// find a line whose length bigger than 200 pixels
lines = cvHoughLines2(canny, stor, CV_HOUGH_PROBABILISTIC, 1, CV_PI / 180, 80, 200, 30);
cvZero(dst);
CvPoint maxStart, maxEnd; // save the coordinate of the head and rear of the line we want
int maxDistance = 0; // The maximum distance of all lines found by [cvHoughLines2]
for (int i = 0; i < lines->total; i++) // lines->total: the number of lines
{
// variable 'lines' is a sequence, [cvGetSeqElem] gets the (i)th line, and it returns its head and rear.
CvPoint* line = (CvPoint*)cvGetSeqElem(lines, i);
// line[0] and line[1] is respectively the line's coordinate of its head and rear
if (abs(line[0].x - line[1].x) > maxDistance)
{/* It's a trick because the line is almost horizontal.
strictly, it should be
sqrt((line[0].x - line[1].x)*(line[0].x - line[1].x)+(line[0].y - line[1].y)*(line[0].x - line[1].x))
*/
maxDistance = abs(line[0].x - line[1].x);
maxStart = line[0];
maxEnd = line[1];
}
}
cvLine(dst, maxStart, maxEnd, cvScalar(255), 1); // draw the white line[cvScalar(255)] in a black background
cvReleaseImage(&src); // free the memory
cvReleaseMemStorage(&stor);
}
/*
еҮҪж•°еҠҹиғҪпјҡж“ҰйҷӨйқўз§Ҝе°ҸдәҺгҖҗ15дёӘеғҸзҙ гҖ‘зҡ„е°Ҹеқ—е„ҝ
иҫ“е…Ҙиҫ“еҮәпјҡж— иҝ”еӣһеҖјпјҢзӣҙжҺҘеҜ№иҫ“е…Ҙзҡ„еӣҫеғҸиҝӣиЎҢж“ҚдҪң
*/
void erase(IplImage* raw)
{
IplImage* src = cvCloneImage(raw);
/*Binarization and inverse the black and white because the function next only find white area while
the word in image is black.*/
cvThreshold(src, src, 120, 255, CV_THRESH_BINARY_INV);
// create some space to save the white areas but we access it via variable 'cont'
CvMemStorage* stor = cvCreateMemStorage(0);
CvSeq* cont;
cvFindContours(src, stor, &cont, sizeof(CvContour), CV_RETR_EXTERNAL); // find the white regions
for (; cont; cont = cont->h_next) // Traversal
{
if (fabs(cvContourArea(cont)) < 15) // if its Area smaller than 15, we fill it with white[cvScalar(255)]
cvDrawContours(raw, cont, cvScalar(255), cvScalar(255), 0, CV_FILLED, 8);
}
cvReleaseImage(&src);
}
int main()
{
IplImage* src = cvLoadImage("D:/test.png");
cvNamedWindow("еҺҹеӣҫ", 1);
cvShowImage("еҺҹеӣҫ", src);
IplImage* gray = cvCreateImage(cvGetSize(src), IPL_DEPTH_8U, 1);
IplImage* canny = cvCreateImage(cvGetSize(src), IPL_DEPTH_8U, 1);
IplImage* dst = cvCreateImage(cvGetSize(src), IPL_DEPTH_8U, 1);
IplImage* binary = cvCreateImage(cvGetSize(src), IPL_DEPTH_8U, 1);
cvCvtColor(src, gray, CV_RGB2GRAY);
cvThreshold(gray, binary, 120, 255, CV_THRESH_OTSU);
findLines(gray, dst);
cvNamedWindow("dst", 1);
cvShowImage("dst", dst);
for (int row = 0; row < binary->height; row++)
for (int col = 0; col < binary->width; col++)
{
if (cvGet2D(dst, row, col).val[0] == 255)
{
int up = 0, down = 0;
int white = 0;
for (int i = row; i >= 0; i--)
{
if (cvGet2D(binary, i, col).val[0] == 0)
{
up++;
white = 0;
}
else white++;
if(white > 2) break;
}
white = 0;
for (int i = row; i < binary->height; i++)
{
if (cvGet2D(binary, i, col).val[0] == 0)
{
down++;
white = 0;
}
else white++;
if (white > 2) break;
}
if (up + down < 8)
{
for (int i = -up; i <= down; i++) cvSet2D(binary, row + i, col, cvScalar(255));
}
}
}
cvNamedWindow("з»“жһң", 1);
cvShowImage("з»“жһң", binary);
erase(binary);
//cvDilate(binary, binary, NULL, 1);
cvErode(binary, binary, NULL, 1);
cvNamedWindow("иҶЁиғҖи…җиҡҖ", 1);
cvShowImage("иҶЁиғҖи…җиҡҖ", binary);
cvSaveImage("D:/result.png", binary);
cvReleaseImage(&src);
cvReleaseImage(&canny);
cvReleaseImage(&gray);
cvReleaseImage(&dst);
cvReleaseImage(&binary);
cvWaitKey(0);
return 0;
}иҝҷдёӘж–№жі•еҫҲз®ҖеҚ•зҡ„пјҢе°ұжҳҜеңЁжүҫеҲ°зӣҙзәҝпјҲзӣҙзәҝе®ҪеәҰдёә1пјүеҗҺпјҢжІҝзқҖзӣҙзәҝд»Һе·ҰеҲ°еҸіеҜ№дәҢеҖјеҢ–еӣҫиҝӣиЎҢдёҠдёӢжү«жҸҸпјҢеҰӮжһңиҝҷдёӘзӣҙзәҝзҡ„е®ҪеәҰпјҲй»‘иүІзҡ„е®ҪеәҰпјүе°ҸдәҺ8дёӘеғҸзҙ пјҢеҲҷи®Өдёәе®ғеҸӘжҳҜзӣҙзәҝпјҢиҖҢдёҚжҳҜж–Үеӯ—зҡ„дёҖйғЁеҲҶпјҢйӮЈд№Ҳе°Ҷе®ғеЎ«жҲҗзҷҪиүІпјӣеҸҚд№ӢпјҢеҜ№дәҺзӣҙзәҝжҳҜж–Үеӯ—зҡ„дёҖйғЁеҲҶиҝҷз§Қжғ…еҶөпјҢеҲҷдёҚеҜ№е®ғиҝӣиЎҢд»»дҪ•ж“ҚдҪңгҖӮ
иҝҷж ·еҫ—еҲ°зҡ„з»“жһңеҰӮдёӢеӣҫ2.1жүҖзӨә
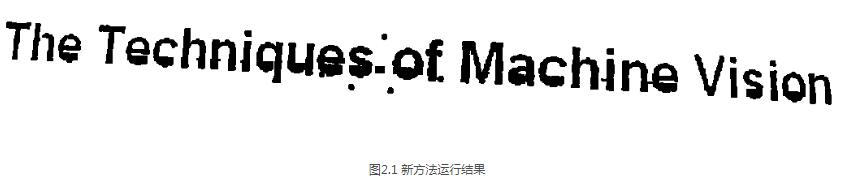
еҪ“然иҝҷдёӘз»“жһңжңүзӮ№е·®ејәдәәж„ҸпјҢеҰӮжһңдҪ жңүжӣҙеҘҪзҡ„жғіжі•пјҢиҜ·еңЁдёӢйқўз•ҷиЁҖпјҢжҲ‘们дәӨжөҒдәӨжөҒгҖӮ
зңӢе®ҢдёҠиҝ°еҶ…е®№пјҢжҳҜдёҚжҳҜеҜ№openCVеҺ»йҷӨж–Үеӯ—дёӯд№ұе…Ҙзҡ„зәҝжқЎзҡ„ж–№жі•зӨәдҫӢжңүиҝӣдёҖжӯҘзҡ„дәҶи§ЈпјҢеҰӮжһңиҝҳжғіеӯҰд№ жӣҙеӨҡеҶ…е®№пјҢж¬ўиҝҺе…іжіЁдәҝйҖҹдә‘иЎҢдёҡиө„и®Ҝйў‘йҒ“гҖӮ





