这篇文章主要介绍了pytorch对梯度进行可视化进行梯度检查的示例分析,具有一定借鉴价值,感兴趣的朋友可以参考下,希望大家阅读完这篇文章之后大有收获,下面让小编带着大家一起了解一下。
目的: 在训练神经网络的时候,有时候需要自己写操作,比如faster_rcnn中的roi_pooling,我们可以可视化前向传播的图像和反向传播的梯度图像,前向传播可以检查流程和计算的正确性,而反向传播则可以大概检查流程的正确性。
实验
可视化rroi_align的梯度
1.pytorch 0.4.1及之前,需要声明需要参数,这里将图片数据声明为variable
im_data = Variable(im_data, requires_grad=True)
2.进行前向传播,最后的loss映射为一个一维的张量
pooled_feat = roipool(im_data, rois.view(-1, 6)) res = pooled_feat.pow(2).sum() res.backward()
3.注意求loss的时候采用更加复杂,或者更多的运算(这样在梯度可视化的时候效果才更加明显)
可视化效果
原始图片

梯度可视化图片

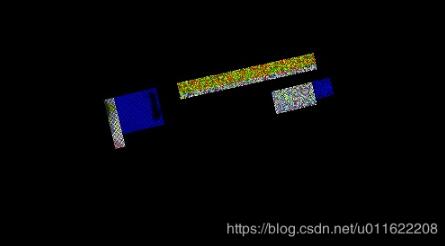
原图+梯度图

小结:
可以看到误差梯度的位置是正确的,误差是否正确,需要其他方式验证(暂时没有思路)
可以看到上面在求loss的时候为:loss = sum(x2),但是如果换成:loss = mean(x),效果就没有上面明显。
实验二的效果

loss = mean(x)
可以看到根本无法看到误差梯度的位置信息
实验三:loss = sum(x)

小结: 可以看到位置信息有差别,比如国徽部分,这会让人以为,国徽部分只利用了左部分的信息,或者自己手写的操作误差索引不对。
可以通过两种方式进行验证
1.用更多,更复杂的运算求loss,比如pow,等
2.用matplotlib显示图片后,用鼠标可以指示每个点的具体的值,可以检测有误差梯度区域是否和无误差梯度区域有差别。
感谢你能够认真阅读完这篇文章,希望小编分享的“pytorch对梯度进行可视化进行梯度检查的示例分析”这篇文章对大家有帮助,同时也希望大家多多支持亿速云,关注亿速云行业资讯频道,更多相关知识等着你来学习!
亿速云「云服务器」,即开即用、新一代英特尔至强铂金CPU、三副本存储NVMe SSD云盘,价格低至29元/月。点击查看>>
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。



 计算
计算 安全
安全 数据库
数据库 网络和加速
网络和加速 企业服务
企业服务



